
Envoyé par
Auteur

Je pense que le capteur de pression est pour le sujet : le sujet doit sans doute indiquer en retour la force qu'il ressent sur la peau. Sinon cela nécessiterait 12 capteurs.
Ah, ok ! Moi au début je pensais que c'était pour contrôler la pression du moteur sur la peau. C'est parce que je partais d'une impression personnelle :
Si je pose en surface de ma peau un objet pointu, je sais a peu près où est cet objet.
Si j'enfonce cet objet pointu alors je sais précisément où j'ai mal.
Je sais pas pourquoi j'avais l'impression que la douleur/sensation ont plusieurs niveau de dispersion qui vont de diffus à ciblé. Un peu comme quand y a un truc qui te picote le bras, tu risques de tourner ton bras pour chercher où exactement. Par contre quand tu te piques bien comme y faut (épine de rosier, guêpe, abeille, barbelé, ...) tu n'as pas besoin de chercher... tu sais où c'est 
Envoyé par
Auteur
Pour l'interprétation, tu ne peux pas faire d'IRM car les composants (les moteurs) ne sont pas IRM-compatibles. Les moteurs iraient directement dans le tunnel en faisant au passage de gros dégâts

Ouais c'est vrai ça, j'aurai du y penser, de l'électronique dans un IRM a moins de mettre que la tête dedans mais même a proximité d'un IRM je ne sais pas comment va se comporter le montage !











) et pour une expérience j'ai besoin d'un matériel spécifique, qu'il me faut construire. Je suis vraiment débutante et j'ai vraiment besoin d'un coup de main pour le schéma électronique et les composants nécessaires...
 Répondre avec citation
Répondre avec citation


















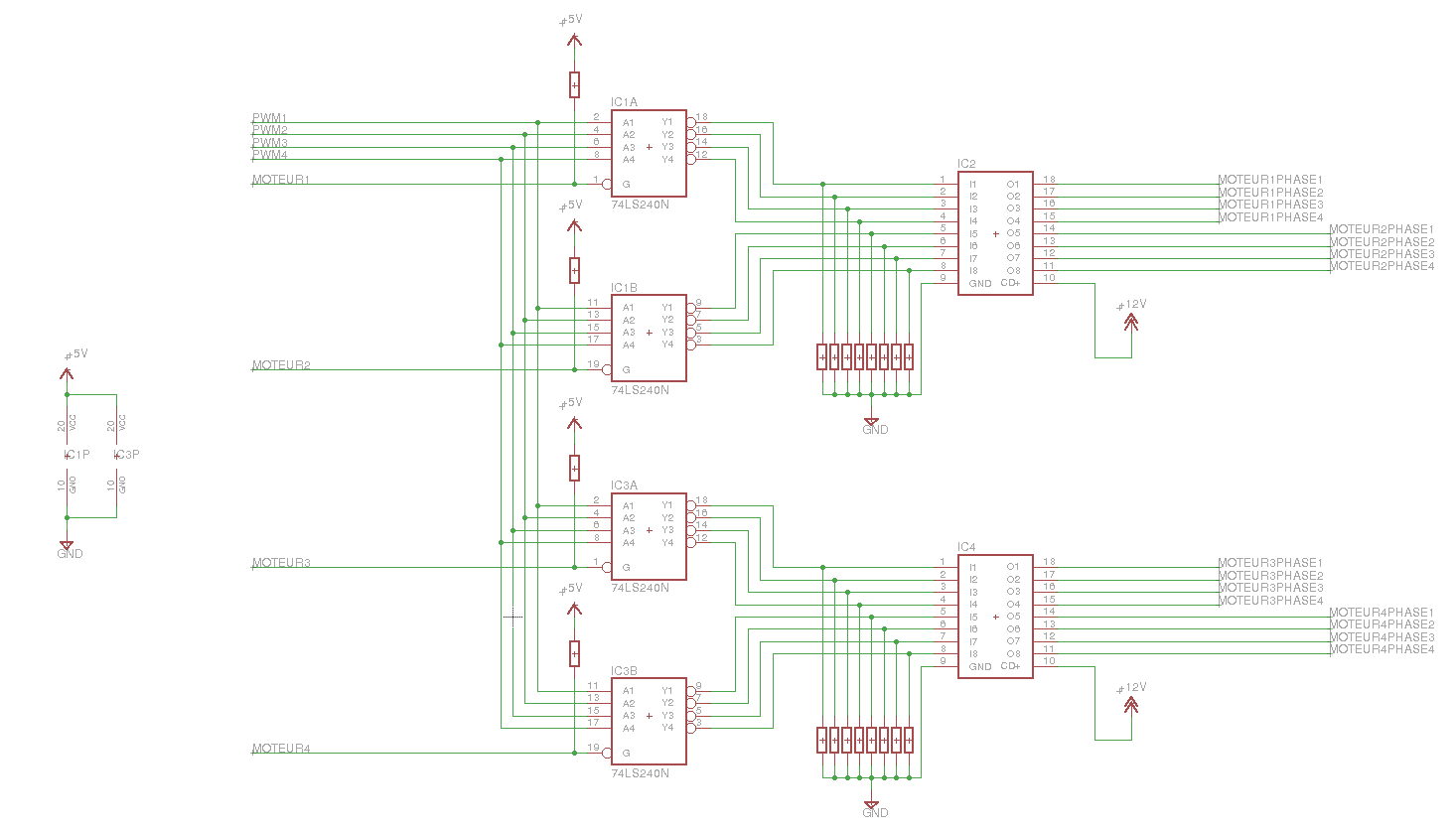
 Car il faut les activer au bon moment et dans le bon ordre pour que le moteur tourne dans le bon sens.
Car il faut les activer au bon moment et dans le bon ordre pour que le moteur tourne dans le bon sens.
 je viens de m'en rendre compte y a 5min, c'est écrit dans la description du produit.....
je viens de m'en rendre compte y a 5min, c'est écrit dans la description du produit.....
Partager