


En effet, c'est ce genre de connecteur qu'il te faut :
http://fr.farnell.com/jst-japan-sold...-9b10-00001460
Sur la photo on ne voit pas bien si il y a un détrompeur au niveau du connecteur ?
Molex et (peut être) Amphenol doivent aussi en faire.
Inscrivez-vous gratuitement
pour pouvoir participer, suivre les réponses en temps réel, voter pour les messages, poser vos propres questions et recevoir la newsletter















En effet, c'est ce genre de connecteur qu'il te faut :
http://fr.farnell.com/jst-japan-sold...-9b10-00001460
Sur la photo on ne voit pas bien si il y a un détrompeur au niveau du connecteur ?
Molex et (peut être) Amphenol doivent aussi en faire.
La science ne nous apprend rien : c'est l'expérience qui nous apprend quelque chose.
Richard Feynman




C'est ce à quoi je pensaisEnvoyé par Vincent PETIT

normal j'ai oublié de poster le lien dans mon message
Attendons la photo de Exzaria pour être sûr.



Oui il y en a un.
On le voit sur la photo du connecteur femelle, à droite toute sur la page, sous "Accessoires", où l'on voit également mieux d'autres connecteurs mâles qui montrent bien l'emplacement du détrompeur.
Et ça se voit bien (croquis + photo) dans le pdf Technical Data Sheeet.
Il a à vivre sa vie comme ça et il est mûr sur ce mur se creusant la tête : peutêtre qu'il peut être sûr, etc.
Oui, je milite pour l'orthographe et le respect du trait d'union à l'impératif.
Après avoir posté, relisez-vous ! Et en cas d'erreur ou d'oubli, il existe un bouton « Modifier », à utiliser sans modération
On a des lois pour protéger les remboursements aux faiseurs dargent. On nen a pas pour empêcher un être humain de mourir de misère.
Mes 2 cts,
--
jp
D'accord.
Donc d'après la datasheet le connecteur de chez Farnell devrait convenir.
Je vais peut être poser une question con mais qu'est ce qui se passe si tu continues de faire tourner le moteur alors que l'actionneur est complètement sortie ? Le moteur débraye ? L'actionneur rerentre ?
Dans les deux cas de figure comment connaîs tu la course de l'actionneur au démarrage par exemple ou après une coupure de courant ? Comment sais tu que l'actionneur est rentré entièrement ?
Sur beaucoup de systèmes il y a des capteurs d'origine et de fin de course qui permettent au logiciel de savoir où est le moteur exactement. Car si le soft dit à l'actionneur de sortir entièrement puis de rentrer entièrement mais que pour une raison ou une autre il y a un redémarrage entre ces deux étapes alors le soft va demander à l'actionneur de sortir entièrement alors qu'il l'est déjà !
Tu vois ce que je veux dire ?
La science ne nous apprend rien : c'est l'expérience qui nous apprend quelque chose.
Richard Feynman
Salut,
je vais répondre à ce qui suit car le sujet m'intéresse, même si je ne suis pas partie prenante.
Alors je n'ai pas de réponses fermes et définitives, mais plutôt des pistes de réflexion à partir de ce que tu as dit :
On va attendre le résultat de la lecture attentive de la doc...
Non ! On sait juste que le moteur est quelque part entre les deux capteurs, sauf si l'un des capteurs dit "il est ici".
Réflexions :
1- en cas de redémarrage sur coupure courant, en fonction de la position à priori inconnaissable du moteur, il est à mon avis impossible de faire tourner le moteur pour détecter sa position par rapport aux détecteurs de début et fin de course : on pourrait générer des catastrophes.
2- Il faudrait que lorsque le système fait tourner le moteur de tant de tours dans un sens ou un autre, il stocke ces valeurs quelque part dans une mémoire non volatile, pour les retrouver au redémarrage : on sait toujours où est le moteur et où est l'outil et dans quel état (genre une pince à telle distance de sa cible est aux trois-quarts ouverte).
En tout état de cause on ne peut plus fonctionner en mode "années 70" : j'ai connu des imprimantes matricielles à tête à aiguilles se déplaçant sur un rail qui, à la mise sous tension, ramenaient tout doucement la tête jusqu'à la butée de position de départ, pour être dans un état connu et stable.
Mais vous imaginez un robot chirurgien en train de recoudre une plaie, coupure ou écran bleu le robot redémarre et rentre ses moteurs pour avoir un point connu alors qu'il était en train de finir sa couture et qu'il devait tirer le fil : va pas être content le patient sous l'aiguille
Il a à vivre sa vie comme ça et il est mûr sur ce mur se creusant la tête : peutêtre qu'il peut être sûr, etc.
Oui, je milite pour l'orthographe et le respect du trait d'union à l'impératif.
Après avoir posté, relisez-vous ! Et en cas d'erreur ou d'oubli, il existe un bouton « Modifier », à utiliser sans modération
On a des lois pour protéger les remboursements aux faiseurs dargent. On nen a pas pour empêcher un être humain de mourir de misère.
Mes 2 cts,
--
jp


Salut ! Heureusement ce n'est pas pour de la chirurgie!Car je pensais initialiser les positions plus du type 70' ! Le système doit pouvoir fonctionner 2h seulement sans se dérégler, en étant toujours allumé. Ensuite je peux réinitialiser les positions de chacun des moteurs. Il suffit que pendant ces 2 heure je conserve la position courante. Le seul problème est : que se passe-t-il si la rotation est bloqué contre un obstacle? Comment le détecter?

Si le câble sur le moteur est trop court, Exzaria devra réaliser une rallonge. Donc il faudrait aussi des connecteurs fil à fil.

Cela dépend de l'utilisation.
Evidement le système "Fin de course" n'est pas valide si on doit savoir ou le moteur se trouve entre les 2 points. Dans ce cas, il faut un système de recopie de position en continue (le plus simple souvent utilisé étant un simple potentiomètre qui fournie une tension analogique image de la position). C'est une mesure de position absolue, ou la mesure donne d'elle-même, en tant que telle la position réelle.
Le système 'Fin de course" se limite simplement aux cas ou l'on a pas besoin de savoir où est le dispositif mais simplement de savoir que le dispositif n'est pas à une des extrémités.
C'est le principe même du système à fin de course. A la réinitialisation, on fait bouger le dispositif dans le sens "Retour à la position repos" jusqu'à ce que le fin de course correspondant dise "c'est bon, il y est". Évidemment le dispositif est prévu pour ça.
C'est une méthode utilisée aussi pour estimée la position entre les butées, mais elle nécessite quand même de connaitre et pouvoir détecter l'arrivée sur les butées, donc fin de course. C'est ce que l'on appelle une mesure relative. La mesure nous donne ici, non pas la position réelle, mais la position relative par rapport à une origine.
Bien sur que si on peut encore fonctionne comme ça, et beaucoup de systèmes actuels fonctionnent comme ça. Tout dépend du besoin.
Alors soit sympa, stp. Si tu conçois un robot chirurgien capable de subir une coupure ou un écran bleu durant une opération, donne moi la marque de ton produit et la liste des hôpitaux où il est installé que j'évite absolument ces établissements
De manière générale, un système à fin de course ne nécessite pas forcément une réinitialisation automatique sur coupure ou autre. Dans le cas de notre robot chirurgien, la réinitialisation serait manuelle selon une procédure bien particulière, opéré par un opérateur. De fait, le robot, sur plantage, resterait dans l'état, devrait être réinitialisé par un chirurgien qui aura, au préalable, retiré l'aiguille, le fil, terminé manuellement la couture, et voire déjà renvoyé le patient en salle de réveil.
--- Sevyc64 ---
Parce que le partage est notre force, la connaissance sera notre victoire
En effet, ma proposition avec les capteurs d'origine et fin de course ne colle pas avec la définition que j'en fais.
Pour connaître une position exacte, on utilise souvent un codeur incrémental.
Ce que je voulais dire c'est ce que Sevyc vient de corriger. Le capteur d'origine sert à avoir le point d'origine à partir du quel on va compter les pas. Tout comme la majorité des machines CNC. Le capteur de fin de course permet de ne pas sortir de la zone de travail. Et au démarrage l'appareil peut très bien faire un allé/retour entre les deux capteurs pour s'auto-calibrer et connaître le nombre de pas maximum ainsi si l'appareil rencontre une résistance anormal et que tout débraye alors le moteur voit qu'il a fait trop de pas (malgré que le capteur de fin de course n'ait jamais été atteint) et se coupe par sécurité.
Le problème au quel je pense c'est que part défaut on pourrait se dire "je considère mes actionneurs entièrement rentrés à la sortie d'usine et au tout premier usage" et faire tout les calculs à partir de cette pure hypothèse. Hors ce n'est qu'une hypothèse et c'est pour cette raison que je posais la question :
Que se passe-t-il si l'actionneur est sortie ou rentré à fond et qu'on continue d'alimenter le moteur ?
La science ne nous apprend rien : c'est l'expérience qui nous apprend quelque chose.
Richard Feynman
Une question pratique pour Exzaria : as-tu tous les outils pour réaliser ton interface et les connexions nécessaires ? Perceuse, fer à souder, tournevis, etc. Ou alors est-ce qu'il y a un atelier dans ton labo ?
L'ennui de cette méthode est que si le moteur est tourné manuellement pour une raison ou pour une autre on fausse la position.
Si c'est après le processus d'initialisation, OUI.
Cela necessite un nouveau processus d'initialisation consistant au retour sur la butée d'origine. C'est le processus décrit par Jipété concernant l'imprimante, qui se produit notamment dès qu'elle détecte que le capot a été ouvert.
--- Sevyc64 ---
Parce que le partage est notre force, la connaissance sera notre victoire
Voici la tête des connecteurs :
La dimension est env. 0.5cm de large
a première vue, il semblerait que le pas soit ici de 1.27mm !
--- Sevyc64 ---
Parce que le partage est notre force, la connaissance sera notre victoire
Salut,
C'est pas standard?
Sinon je peux couper et mettre d'autres embouts? (meme si 12*4 ca fait beaucoup....)
J'ai le matériel chez moi, il me faut juste un fer à souder!
Sinon j'attend toujours les drivers, par contre j'ai recu le capteur de force, je l'ai testé c'est nickel (il faudra que je vérifie en live s'il me faut un plus ptit et voir si la précision convient). J'ai également les diodes et l'alim. Quand j'aurais recu les drivers, normalement cette semaine, il me restera le pb de connectique pour pouvoir tester!
Si c'est standard, mais des standards, il y en a plusieurs. Il faut juste que l'autre partie de la connexion soit du même standard
--- Sevyc64 ---
Parce que le partage est notre force, la connaissance sera notre victoire
si c'est standard, même si on trouve aussi des connecteurs avec un pas de 1,25mm.
Oui tu peux remplacer le connecteur. Mais de quels outils disposes-tu ? As-tu une fer à souder ? Des pinces à sertir ? Est-ce qu'il y a à côté de ton labo une équipe qui peut te fournir du matériel ?
Car tu as plusieurs solutions :
1- placer un connecteur mâle sur tes moteurs puis les relier avec une rallonge (équipée d'un connecteur femelle) jusqu'au driver
ou
2- rallonger les câbles que tu as sans utiliser de connecteur : tu soudes les fils de ta rallonge sur les câbles de ton moteur. Mais cela implique, de la gaine thermorétractable et un décapeur thermique.
Fer à souder, je vais avoir.Pince à sertir non (mais à voir en fonction du prix). Pour mon labo,en électronique il n'y a pas grand chose....
Quel type de connecteur dois-je utiliser? Il faut que je sache si c'est 1.27 ou 1.25??
Comment puis je savoir de quel standard il s 'agit exactement? et ou trouver ce type de connecteur?
Pour le connecteur que tu as il te faut un connecteur mâle (puisque sur le moteur c'est un femelle). Mais à ma connaissance (en tout cas je n'en ai jamais trouvé), il te faut un connecteur mâle sur câble pour le prolongateur.
Donc à mon avis le mieux est de le remplacer. Après tu as différentes tailles. Est-ce que le poids du connecteur peut avoir une influence sur ta manip (ça alourdi le moteur) ?

Vous avez un bloqueur de publicités installé.
Le Club Developpez.com n'affiche que des publicités IT, discrètes et non intrusives.
Afin que nous puissions continuer à vous fournir gratuitement du contenu de qualité, merci de nous soutenir en désactivant votre bloqueur de publicités sur Developpez.com.
 Répondre avec citation
Répondre avec citation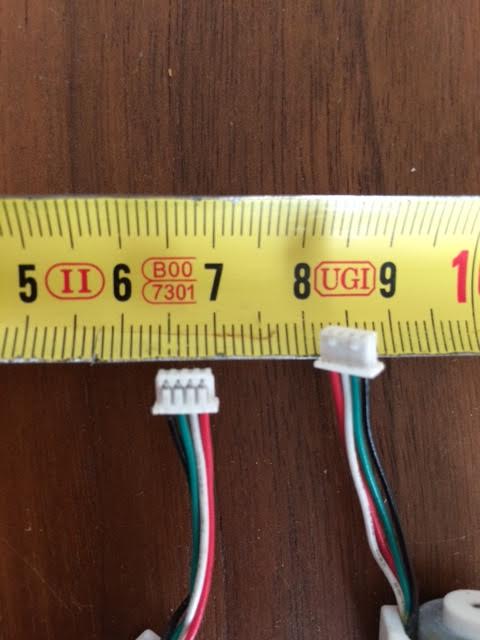
Partager