











Salut à tous.
J'ai fait l'acquisition du bus pirate (v3.6a) TOL 12942 de chez Sparkfun.
--> https://www.gotronic.fr/art-module-b...2942-24664.htm
Je désire exploiter ce bus pirate pour des raisons d'apprentissage, et aussi faire mumuse en électronique.
Pour l'instant, j'ai fait un seul test (mode DIO), celui de faire clignoter une led.
Comme j'avais le matériel nécessaire à ce test, cela n'a pas été trop compliqué.
Entre autre, j'avais fait le test avec ma raspberry de créer un chenillard en utilisant un montage assez complet :
--> un bradboard
--> des leds rouge, jaune et verte
--> des résistances
--> des boutons-poussoirs
--> un t-cobbler
--> du fil rigide de couleurs rouge et jaune pour relier les différents composants.
J'ai même fait le test en introduisant un mini script en BASIC.
Je désire poursuivre mon apprentissage en utilisant les autres possibilités qu'offre le bus pirate.
La difficulté que je rencontre est l'achat du matériel élctronique.
pour l'instant, je me suis inspiré de deux didacticiels :
--> https://kb99.wordpress.com/2016/11/1...du-bus-pirate/
--> https://skyduino.wordpress.com/2011/...ute-situation/
Mais comme je suis débutant en électronique, je rencontre des difficilutés
1) j'ai fait l'acquisition d'un afficheur LCD 20x4 de chez Joy-It (HD44780) :
--> https://www.gotronic.fr/art-afficheu...eres-25649.htm
Cela m'a permis de créer un programme en 'C/C++' où j'affiche depuis ma raspberry, du texte et quelques animations.
Sauf que je ne peux pas l'utiliser avec le bus pirate.
Le fautif est le backpack qui se trouve à l'arrière (PCF8574) et qui fonctionne en I2C. L'afficheur doit être un HD44780.
Je vais en acheté un autre (LCD 2x16), en espérant ne pas me tromper dans mon acquisition, sans ce backpack :
--> https://www.gotronic.fr/art-afficheu...16sbh-2236.htm
Oui mais, pour l'utiliser, il me faut un câble spécial (Probe kit) :
--> https://www.seeedstudio.com/Bus-Pirate-Cable-p-932.html
et un adaptateur pour piloter ce HD44780 :
--> https://www.seeedstudio.com/Bus-Pira...-v3-p-684.html
Et comme on peut le lire, c'est "out of stock" !
Je ne sais pas où me procurer ces deux accessoires ???
2) j'aimerai faire le test en mode SPI (Serial Peripheral Interface).
Pour cela, j'ai besoin :
--> un bradboard
--> un 74HC595
--> des résistances
--> des leds
--> un condensateur de 0.1"f (???)
Je m'inspire du site consacré à l'arduino pour effectuer le montage :
--> https://www.arduino.cc/en/Tutorial/ShiftOut
Chaque Led sera reliée à une résistance et à la masse (GND).
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
11
12
13
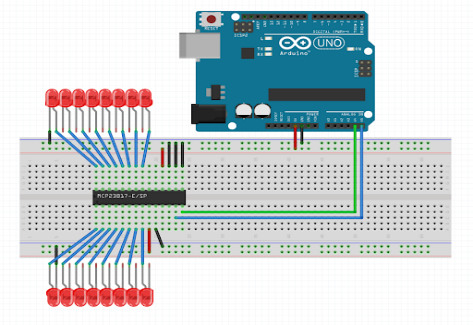
Sur le schéma suivant :
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
11
12
13
je vois trois résistances identiques (marron - noir - orange - or : 10K ohms 5%).
--> https://www.digikey.fr/fr/resources/...or-code-4-band
N'est-ce pas trop important comme valeur (10K ohms) ?
Avec mes "LEDS 5MM ÉCONOMIQUES", j'ai placé des résistances à 1k ohms.
La luminosité ne m'intéresse pas. Je désire voir si la led s'allume ou pas.
Ensuite, je vois, ce qui me semble être un condensateur "100 nk 63".
Si j'ai bien compris, ceci est un MKT type "millefeuille" et se lit "100 nF" tolérance "10%" tension de service "63 Volts".
Que dois-je comprendre par cette notation 0.1"f ? 0.1 micro farad ? C'est-à-dire 100 nano farad ?
A me confirmer par ce que je ne suis pas du tout sûr de moi.
Que pensez-vous de ce montage ?
Manque-t-il quelque chose ? Si oui, quoi ?
3) le mode ADC (analog to digital converter).
Je désire me procurer un potentiomètre de 10k ohms.
Oui, sauf que je ne sais pas du tout lequel prendre :
--> https://www.gotronic.fr/cat-potentiometres-263.htm
il y a ds potentiomètres :
--> MONOS LINÉAIRES ÉCONOMIQUES
--> MONOS LINÉAIRES (A)
--> MONOS LOGARITHMIQUES
--> MONOS LINÉAIRES À PISTE CERMET
--> DOUBLES LINÉAIRES (A)
--> DOUBLES LOGARITHMIQUES (B)
--> MONOS LINÉAIRES À INTERRUPTEUR
--> BOBINÉS 4W
--> MONOS LINÉAIRES ÉTANCHES
--> BOBINÉS 10 TOURS
--> MOTORISÉS
Quand on ne sait pas, la difficulté réside dans le choix que l'on doit faire.
Il ne doit servir uniquement pour ce test mais à d'autres usages.
Autant faire en sorte qu'il soit polyvalent.
4) le mode I2C.
Que prendre comme module RTC (Real Time Clock) ?
J'aime bien celui-ci :
--> https://www.gotronic.fr/art-module-h...3296-25536.htm
Il peut se brancher sur n'importe quel breaboard.
Qu'est-ce que vous en pensez ?
5) je désire faire une prise de contrôle du bus pirate à partir de windows, sous la forme d'un script écrit en "C/C++" qui va gérer la console uart.
Cela va me permettre de ne pas retaper systématiquement l'ensemble des commandes pour les tests sur le bus pirate.
Avez-vous déjà fait ce genre de programme ?
6) Et pour finir, avez-vous utilisez ce bus pirate et à quelle occasion ?
Qu'est-ce que vous en pensez ?
@+


 de mon aide, vous pouvez cliquer sur
de mon aide, vous pouvez cliquer sur  .
. Répondre avec citation
Répondre avec citation






















Partager