1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
|
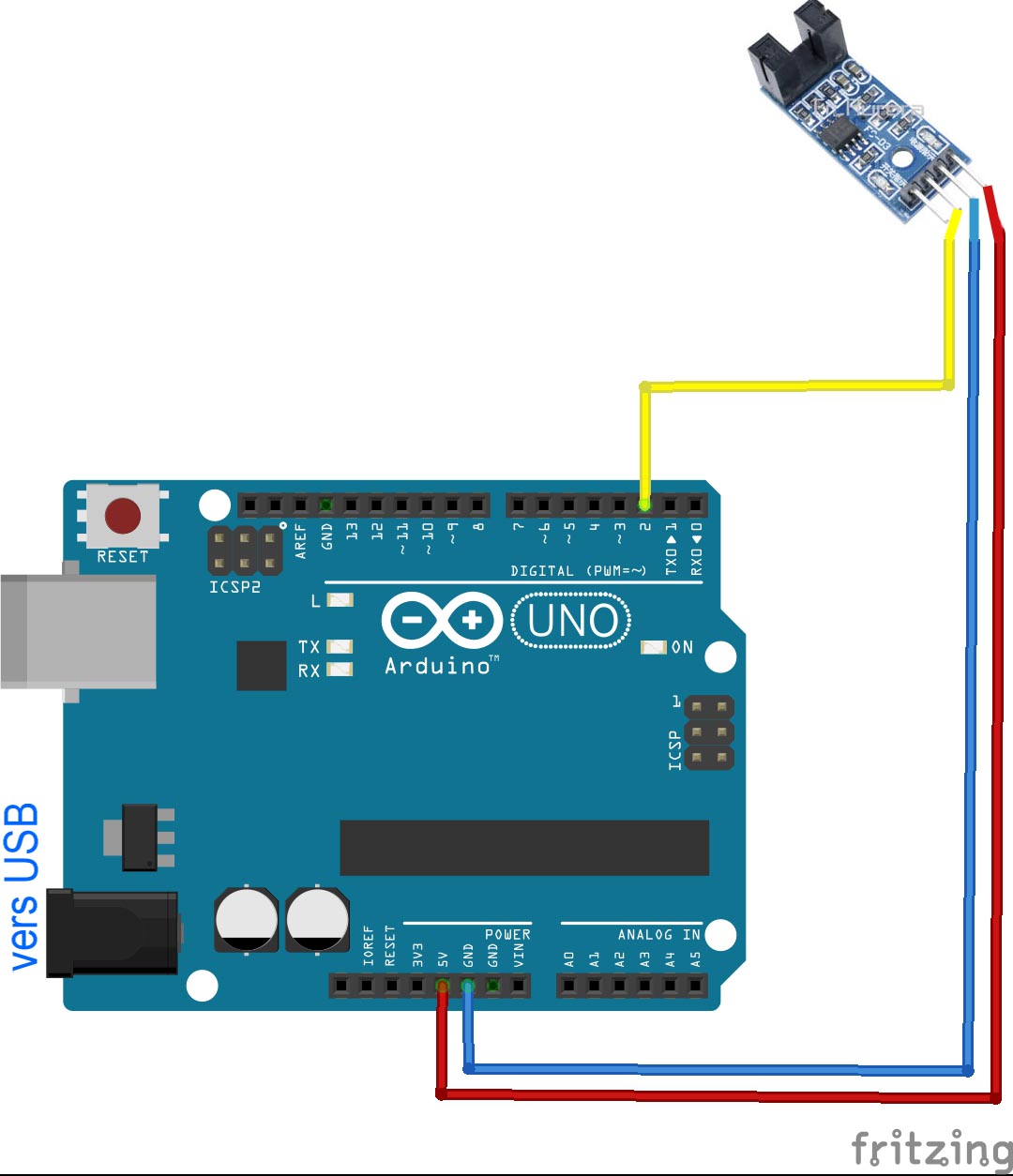
const byte pin = 2;
volatile byte state = LOW;
volatile unsigned long temps = 0, last_temps = 0;
volatile byte cpt = 0;
void setup() {
pinMode( pin, INPUT_PULLUP );
attachInterrupt( digitalPinToInterrupt( pin ), set_interrupt, RISING );
Serial.begin( 9200 );
}
void loop() {
Serial.print( "temps " );
Serial.println( temps );
Serial.print ( "compteur trous " );
Serial.println( cpt );
Serial.print ( "etat " );
Serial.println( state );
delay(1000);
}
void set_interrupt(){
temps = millis();
state = 0;
// rebond du capteur
if( ( temps - last_temps ) > 100 ) {
++cpt;
last_temps = temps;
state = 3;
}
} |












 Répondre avec citation
Répondre avec citation
























 Tu as constaté des rebonds à l'oscillo, ou en affichant des valeurs dans le terminal Série ?
Tu as constaté des rebonds à l'oscillo, ou en affichant des valeurs dans le terminal Série ?
Partager