







Bjr,
Une question sur le comportement du paramètre RISING dans attachinterrupt.
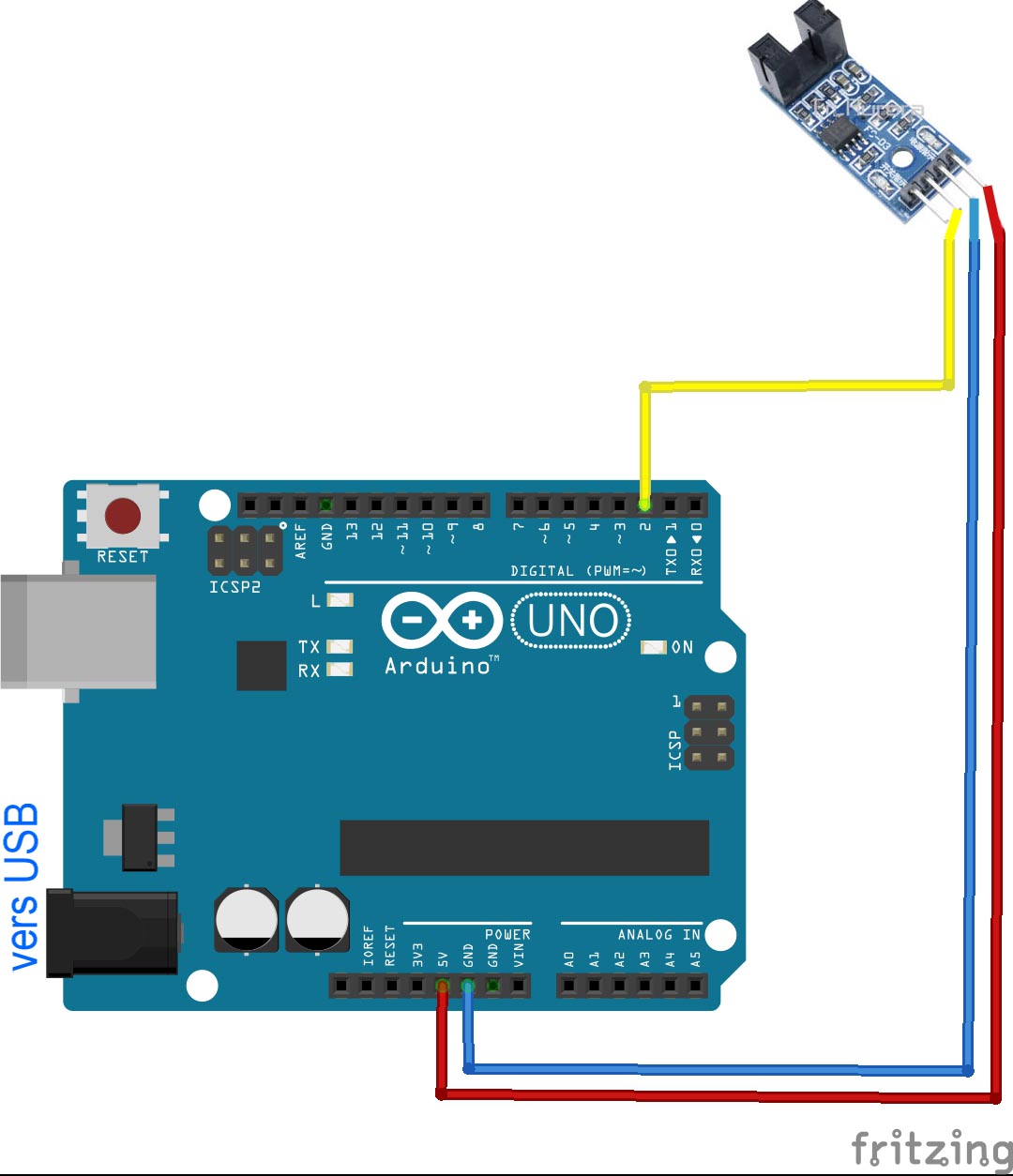
J'ai une interruptions lorsque le
Capteur LM 393 passe de 0 à 1 mais également lors du passage de 1 à 0 comment cela est il possible ?
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
 Répondre avec citation
Répondre avec citation




















 Tu as constaté des rebonds à l'oscillo, ou en affichant des valeurs dans le terminal Série ?
Tu as constaté des rebonds à l'oscillo, ou en affichant des valeurs dans le terminal Série ?

Partager