









Bonjour,
je me suis lancé dans un projet de robot humanoïde et j'ai quelques questions pour sa réalisation au niveau matériel, toute fois j'ignore si ce forum est adapté, les voici:
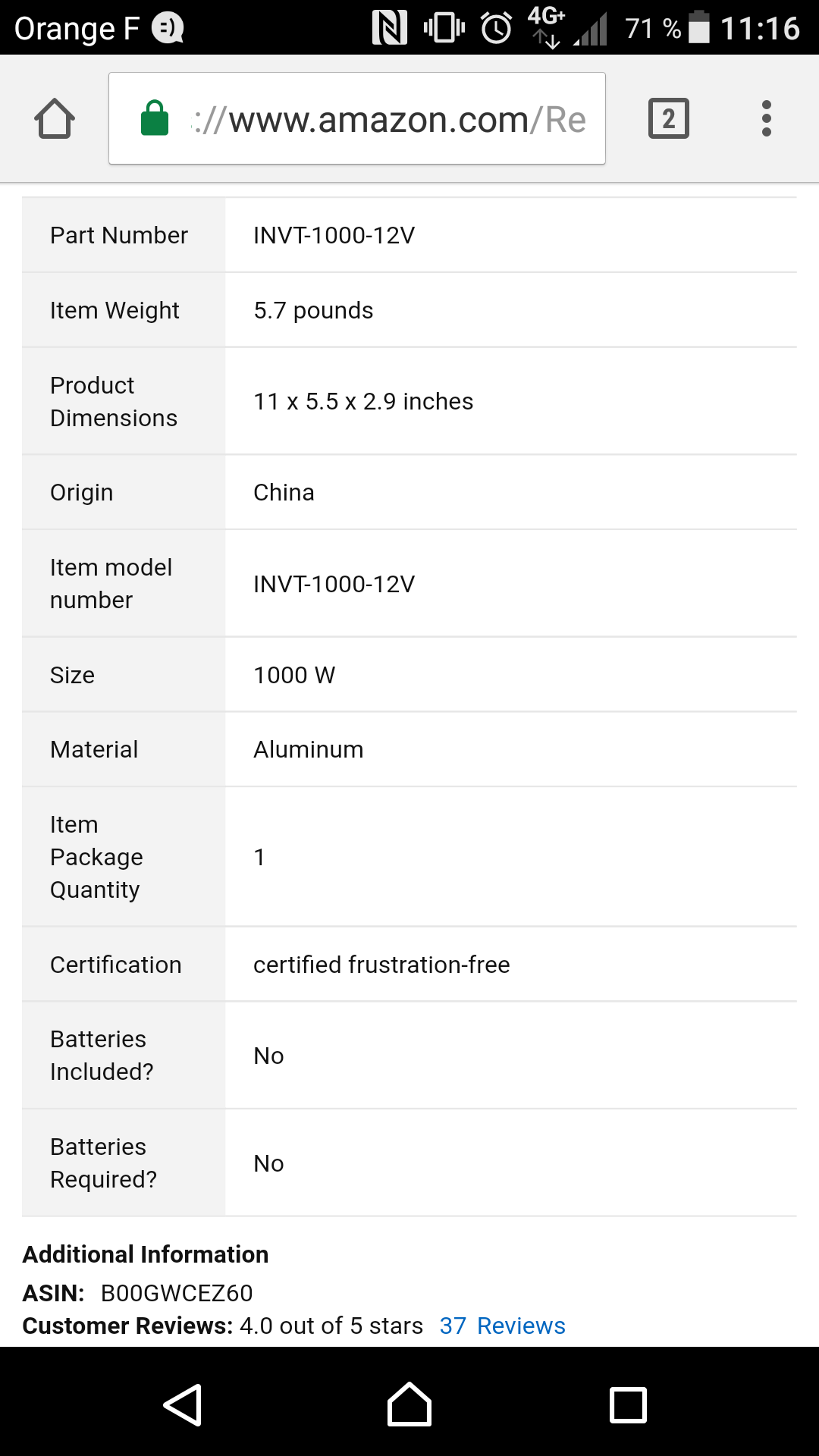
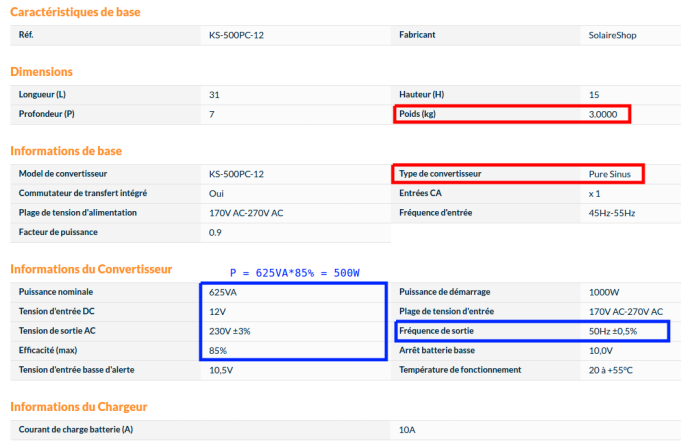
La batterie, ceci https://www.amazon.com/Renogy-Off-Gr.../dp/B00GWCEZ60 doit distribuer l'énergie dont ont besoin 15 servomoteurs 50kg.cm 60rpm (50 watts en entré), 45 en moyenne de 30 watts en entré unité ainsi qu'un ordinateur de bureau embarqué qui demande une alimentation 200 watts en entré. La batterie est-elle selon vous correctement dimensionnée et je ne vois rien faisant référence à sont autonomie, comment pourrais-je en prendre connaissance ?
La caméra http://www.robotshop.com/en/arducam-...ter-board.html, je ne vois aucune mention de la connectique exploitée, sauriez-vous quelle-est-elle ?
Le microphone, je trouve ce genre d'objet http://www.gotronic.fr/art-micro-min...m310-21022.htm, comment suis-je censé le relier à ma carte mère ?
L'accéléromètre http://www.gotronic.fr/art-accelerom...3083-23506.htm et le haut-parleur http://www.robotshop.com/eu/fr/haut-...t-imprime.html question similaire à celle du microphone.
Interférences électromagnétiques possibles dus aux servomoteurs en marche, comment calculer leur impacte et potentiellement s'en prémunir ?
Merci d'avance pour les intervenants.
 Répondre avec citation
Répondre avec citation


















Partager