










Bonjour,
en math j'ai un niveau lycée ce qui fait que j'ai du mal à comprendre les histoires de matrice dans ce genre de problématique.
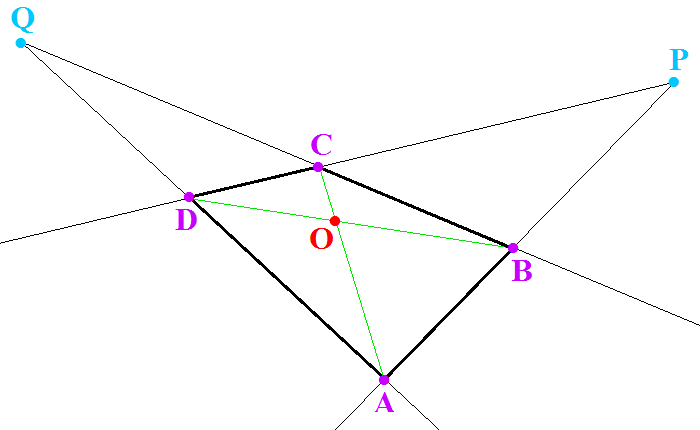
J'arrive à détecter les bords d'un carré avec ma webcam. J'essai de trouver l'orientation du carré à partir des coordonnées des 4 sommets.
Je suis dans le cas d'une projection perspective.
J'essai d'utiliser les points de fuites.
Pour un carré de sommets A B C D, je calcul pour deux cotés parallèles (eg [AB] et [DC]) les plans OAB et ODC avec O le centre du repèce de la caméra.
Pour OAB j'obtiens le vecteur normal Noab; puis de même pour ODC Nodc.
Est-ce qu'il est juste de dire que la direction du point de fuite c'est le produit vectorie de Noab ^ Nodc.
Je fais mes calculs et ma représentation 3D avec ThreeJS. J'ai un résultat très approximatif. du coup j'ai des doutes sur ma logique.
 Répondre avec citation
Répondre avec citation






Partager