Salut,
On peut pousser l'analyse d'un système très loin, notamment sur la sûreté de fonctionnement, comme nous l'avons évoqué, mais c'est un sacré boulot.
Dans ce document on parle de ce sujet.
http://dspace.univ-tlemcen.dz/bitstr...95/1/cours.pdf
Pour résumer rapidement, on commence par se poser des questions à l'aide d'outils d'analyses :
APD Analyse Préliminaire des Dangers,
AMDE Analyse des Modes de Défaillances et de leurs Effets,
MDS Méthode du Diagramme de Succès,
MTV Méthode de la Table de Vérité,
MAC Méthode de lArbre des Causes,
MCPR Méthode des Combinaisons de Pannes Résumées,
MACQ Méthode de lArbre des Conséquences,
MDCC Méthode du Diagramme Causes-Conséquences,
MEE Méthode de lEspace des Etats
Le but recherché est toujours "si ça merde, qu'est ce qui se passe ?" Ensuite, on met en place un ou des types de redondances
Redondance homogène
Redondance avec dissemblance
Redondance froide
Redondance chaude
Redondance tiède
et il y en a d'autre....
Pour réellement être efficace, il faut connaître les MTBF des composants qu'on utilise mais aussi leurs états lors d'une défaillance pour trouver des solutions de replies efficaces. Imaginons que tu veuilles protéger des surtensions l'entrée de ton système. Tu as au moins deux choix possibles, la varistance ou la diode transil mais au delà du problème du prix entre les deux :
 La varistance a un mode de défaillance "circuit ouvert" donc si elle est grillée, tu ne le sais pas, jusqu'au jour où l'appareil complet crame à cause d'une surtension et là tu sais que cette protection ne fonctionnait plus.
La varistance a un mode de défaillance "circuit ouvert" donc si elle est grillée, tu ne le sais pas, jusqu'au jour où l'appareil complet crame à cause d'une surtension et là tu sais que cette protection ne fonctionnait plus.
La diode transil a un mode de défaillance "court circuit" donc si elle est grillée, l'appareil est en défaut immédiat et souvent il faut faire intervenir un technicien pour dépanner.
Quelle est la meilleure solution ?
Dans un système SIL 2 en redondance froide (double appareil SIL 1 par exemple), il vaut mieux avoir une transil qui met en défaut un appareil, qui préviendra l'autre pour prendre le relaie comme ça la continuité du process est assurée le temps du dépannage (sûreté du fonctionnement). Personnellement, si on va trop loin en se focalisant sur un détail dans le projet, on se met a faire des design électroniques qui ne sont plus raisonnables. Il faut mieux avoir cette vision mais en plus globale, c'est à dire qu'il vaut mieux avoir deux appareils SIL 1 en redondance pour faire un SIL 2 plutôt qu'un seul appareil SIL 2 où là on n'est plus du tout sur la même conception. Un appareil SIL 3, je n'ose même pas imaginer (deux micros différents dont l'un surveille que l'autre n'est pas mort, triple bloc électronique qui réalise la même fonction et tous prêt à remplacer le premier qui crame..... laisse tomber....)
ps : la règle du 1/3 c'est de dire que si tu as un appareil en 5V alors la tension de service de tous les condo sera de au mois 15V. Idem pour les puissances dissipées dans les résistances etc...
Tu veux qu'on regarde comment étudier la redondance ? Si oui alors donne nous une fonction réalisait par le UNO histoire d'avoir un exemple. (PWM par exemple comme tu avais écrit ici "En ce qui concerne une redondance avec 2 cartes UNO tu veux dire que les "pulses " de récurrence 20 ms ne seront pas en phase doù problème, sauf moyen de les synchroniser ?")










 Répondre avec citation
Répondre avec citation













 ou en détectant la coupure d'alim
ou en détectant la coupure d'alim  ) et est capable de redémarrer là où il s'est arrêté. (Le servo privé d'alimentation dans le même temps n'aura pas bougé, par contre ce n'est pas impossible qu'il bouge un peu à la réapparition de l'alimentation)
) et est capable de redémarrer là où il s'est arrêté. (Le servo privé d'alimentation dans le même temps n'aura pas bougé, par contre ce n'est pas impossible qu'il bouge un peu à la réapparition de l'alimentation) redondance chaude.
redondance chaude. 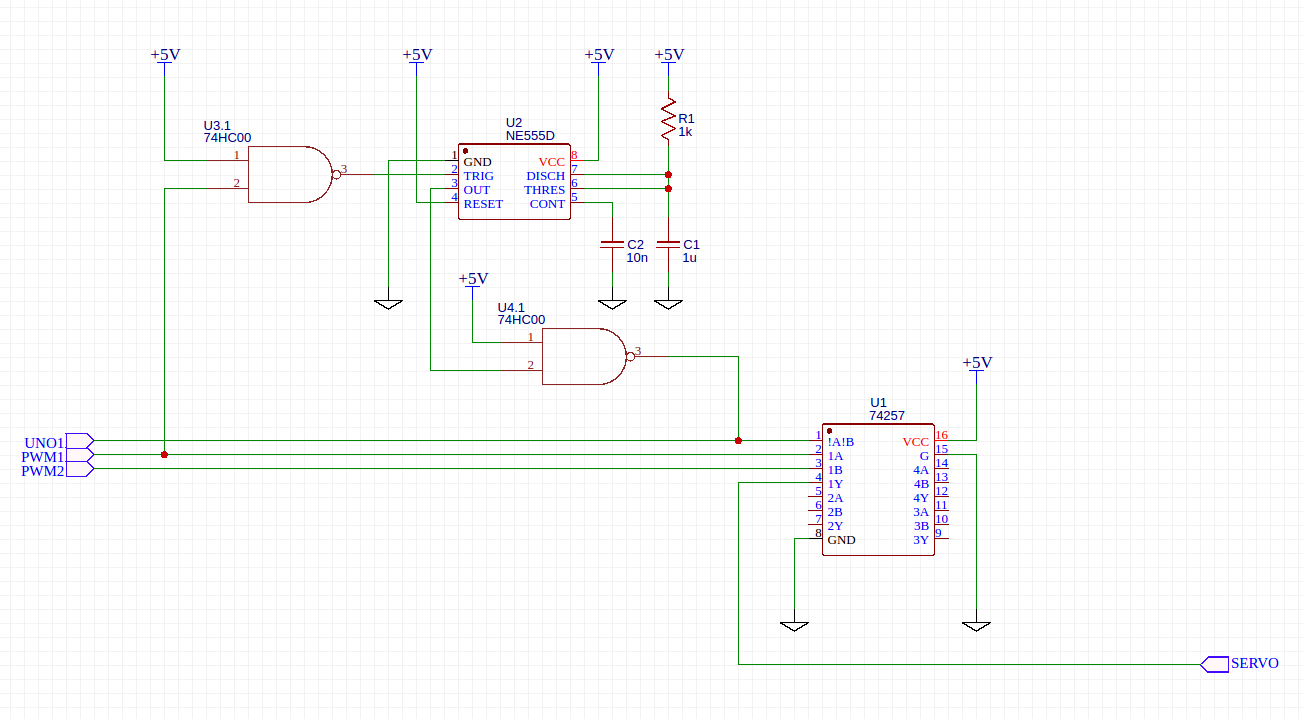


Partager