1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
|
#include <genieArduino.h>
#include <OneWire.h>
#include <EEPROM.h>
//initialisation sliders:
int slider0_val = 0;
int slider1_val = 0;
int slider2_val = 0;
int slider3_val = 0;
int slider4_val = 0;
int slider5_val = 0;
uint8_t neg1 = 0;
uint8_t neg2 = 0;
uint8_t neg3 = 0;
//initialisation des variables temps et talons:
const uint8_t nombreDeNoms = 20;
const uint8_t longeurMaxDuNom = 4;
struct __attribute__((packed)) _paramS {
char nomAD[nombreDeNoms][longeurMaxDuNom + 1]; //nom des AD
unsigned long talMeF[20]; //talon mise en froid auto
unsigned long talStop[20]; //talon pause auto
unsigned long talMaint[20]; //talon maintien froid auto
unsigned long tpsMeFM[20]; //tps de mise en froid manu
unsigned long tpsStopM[20]; //tps pause manu
unsigned long tpsMaintM[20]; //tps maintien
} parametres;
const uint32_t keyword = 0xDEADBEEF;
const uint16_t keywordAddress = 0x00;
const uint16_t paramAddress = keywordAddress + sizeof(keyword);
unsigned long tpsUP[4] = {0}; //tps d'ouverture EV1 à 4
unsigned long tpsDN[4] = {0};
unsigned long tpsMeF[4] = {0};
unsigned long tpsStop[4] = {0};
unsigned long tpsMaint[4] = {0};
//initialisation variable de travail programme:
int Param = 0; //récupération du numéro de profil.
int Dem[4] = {0}; // variable de sélection profil circuit 1 à 4
uint8_t Mode[4] = {0}; //variable pour le circuit 1 à 4
uint8_t FEV[4] = {0}; //récupère la demande de mise en marche des 4 circuits
//variable calcul pression:
int pression2[4] = {0}; //2eme pression pour les 4 circuits
int resultat[4] = {0}; //resultat du calcul pression4 - pression42 pour le circuit 4
int resultatAT = 0; //resultat de l'autotest BMO
//init pin commande EV:
const char EV[8] = {5, 12, 6, 11, 7, 10, 8, 9}; //pin cde EV8
//variables de mesure:
const byte temp = 13; //capteur de temperature branché sur pin 13
OneWire Capt_temp(temp);
int pression1[4] = {0}; //première pression azote 4 circuits
const uint8_t pinHr = A0; //pin mesure humidité
//init capteur pression:
const uint8_t PEV[4] = {A1, A2, A3, A4}; //pin mesure pression circuit 4
//init commande déportée EV:
const uint8_t CEV[8] = {48, 50, 52, 38, 40, 42, 44, 46}; //pin cde déportée EV8
//init variable état cde EV:
uint8_t etatCev[8] = {0};
uint8_t cdev[8]={0};
uint8_t cdevPrecedent[8]={0};
//variable calcul tps mise en froid auto:
float tempCalcul = 0; //variable de température
float PressionCalcul[4] = {0}; //variable de pression 4
//init pin mesure tension LED 1à4:
const uint8_t led[4] = {A5, A6, A7, A8};
uint8_t etatLed[4] = {0};
//init pin mesure tension des alim de la BMO:
const uint8_t pinMesureAlim = A15;
//init multiplexeur mesure alim:
const uint8_t MultiplexeurA = 47;
const uint8_t MultiplexeurB = 49;
const uint8_t MultiplexeurC = 51;
const uint8_t INH = 53;
//init variable de travail:
int i = 0;
int j = 0;
unsigned long temps = 0; //variable de cadencement de loop
uint8_t D[4] = {0}; //idem circuit 4
long T[4] = {0}; //idem circuit 4
uint8_t Val = 0; //variable autorisant la mémorisation des valeurs entrée pour les temps de fonctionnement
uint8_t AT = 0; //compteur servant à l'autotest.
int tempMem = 0; //mémoire température
unsigned long talMeFMem = 0; //mémoire talon mise en froid
unsigned long talStopMem = 0; //mémoire talon stop
unsigned long talMaintMem = 0; //mémoire talon maintien froid
unsigned long tpsMeFMMem = 0; //mémoire mise en froid manuelle
unsigned long tpsStopMMem = 0; //mémoire stop manuel
unsigned long tpsMaintMMem = 0; //mémoire maintien froid manuel
char nomADMem = 0;
int pression1Mem[4] = {0}; //mémoire pression1
int affPression[4] = {9, 14, 19, 24};
int affCr[24] = {31, 32, 33, 34, 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 45, 46, 47, 48, 49, 50, 51, 52, 53, 54};
int HrMem = 0; //mémoire taux d'humidité
int Hr = 0;
int temperature = 0;
int nombreCarac = 5;
int KeyboardValue;
int chauffeCapteur = 190;
Genie genie;
void setup() {
//Serial.begin(9600);
Serial1.begin(200000);
genie.Begin(Serial1);//écran sur le Serial 1
genie.AttachEventHandler(myGenieEventHandler);//cde vérifiant ce qui se passe sur l'écran
genie.WriteContrast(15);
for (int i = 0; i < 8; i++) {
pinMode(CEV[i], INPUT_PULLUP);
pinMode(EV[i], OUTPUT); digitalWrite(EV[i], LOW);
}
for (int i = 0; i < 4; i++) {
pinMode(PEV[i], INPUT);
pinMode(led[i], INPUT);
}
pinMode(temp, INPUT);
pinMode(pinHr, INPUT);
pinMode(pinMesureAlim, INPUT);
pinMode(MultiplexeurA, OUTPUT); digitalWrite(MultiplexeurA, LOW);
pinMode(MultiplexeurB, OUTPUT); digitalWrite(MultiplexeurB, LOW);
pinMode(MultiplexeurC, OUTPUT); digitalWrite(MultiplexeurC, LOW);
pinMode(INH, OUTPUT); digitalWrite(INH, HIGH);
void loop() {
if (millis() - temps >= 30000) { // on mesure la température, l'humidité et la pression toutes les 30s
//mesure pressions:
for (int i = 0; i < 4; i++) {
pression1[i] = ((analogRead(PEV[i]) * 5) / 1023) * 0.0125;// 5V / 400 Bars =0.0125 données du capteur de pression.
PressionCalcul[i] = 0.097085 * pression1[i];
if (pression1[i] != pression1Mem[i]) {
genie.WriteStr(affPression[i], pression1[i]);
genie.WriteObject(GENIE_OBJ_COOL_GAUGE, i, pression1[i]);
}
pression1Mem[i] = pression1[i];
}
//mesure température:
temperature = getTemp();
if (temperature != tempMem) {
genie.WriteObject(GENIE_OBJ_THERMOMETER, 0, temperature + 30); //affichage t°sur thermomètre avec offset de 30
tempCalcul = 196 + temperature + 10;// la température à atteindre pour refroidir les AD a -196°C avec un offset de 10.
}
tempMem = temperature;
//Serial.print("température=");
//Serial.println(temp+10);
//mesure humidité:
Hr = getHr();
if (Hr != HrMem ) {
genie.WriteObject(GENIE_OBJ_LED_DIGITS, 6, Hr);
}
HrMem = Hr;
temps = millis();
}
genie.DoEvents(); // on vérifie ce qu'il se passe sur l'écran
//demarrage de l'autotest de la BMO:
if (AT == 1) {
Autotest();//déclenchement de l'autotest de la BMO
if (resultatAT >= 34) {
genie.WriteStr(28, "OK");
} else {
genie.WriteStr(28, "NOK");
}
}
//memorisation des talons et temps dans le paramétrage:
if (Param != 0) {
if (Val == 1) {
if (neg1 == 1) {
parametres.talMeF[Param] = -slider0_val;
} else {
parametres.talMeF[Param] = slider0_val;
}
if (neg2 == 1) {
parametres.talStop[Param] = -slider1_val;
} else {
parametres.talStop[Param] = slider1_val;
}
if (neg3 == 1) {
parametres.talMaint[Param] = -slider2_val;
} else {
parametres.talMaint[Param] = slider2_val;
}
parametres.tpsMeFM[Param] = slider3_val;
parametres.tpsStopM[Param] = slider4_val;
parametres.tpsMaintM[Param] = slider5_val;
saveParametres();
}
//si les parametres ont changés on les affiches sinon on conserve les anciens:
if (parametres.talMeF[Param] != talMeFMem) {
if (parametres.talMeF[Param] < 0) {
genie.WriteObject(GENIE_OBJ_LED, 12, 1);
genie.WriteObject(GENIE_OBJ_LED_DIGITS, 7, -parametres.talMeF[Param]);
} else {
genie.WriteObject(GENIE_OBJ_LED, 12, 0);
genie.WriteObject(GENIE_OBJ_LED_DIGITS, 7, parametres.talMeF[Param]);
}
}
if (parametres.talStop[Param] != talStopMem) {
if (parametres.talStop[Param] < 0) {
genie.WriteObject(GENIE_OBJ_LED, 13, 1);
genie.WriteObject(GENIE_OBJ_LED_DIGITS, 8, -parametres.talStop[Param]);
} else {
genie.WriteObject(GENIE_OBJ_LED, 13, 0);
genie.WriteObject(GENIE_OBJ_LED_DIGITS, 8, parametres.talStop[Param]);
}
}
if (parametres.talMaint[Param] != talMaintMem) {
if (parametres.talMaint[Param] < 0) {
genie.WriteObject(GENIE_OBJ_LED, 14, 1);
genie.WriteObject(GENIE_OBJ_LED_DIGITS, 9, -parametres.talMaint[Param]);
} else {
genie.WriteObject(GENIE_OBJ_LED, 14, 0);
genie.WriteObject(GENIE_OBJ_LED_DIGITS, 9, parametres.talMaint[Param]);
}
}
if (parametres.tpsMeFM[Param] != tpsMeFMMem) {
genie.WriteObject(GENIE_OBJ_LED_DIGITS, 10, parametres.tpsMeFM[Param]);
}
if (parametres.tpsStopM[Param] != tpsStopMMem) {
genie.WriteObject(GENIE_OBJ_LED_DIGITS, 11, parametres.tpsStopM[Param]);
}
if (parametres.tpsMaintM[Param] != tpsMaintMMem) {
genie.WriteObject(GENIE_OBJ_LED_DIGITS, 12, parametres.tpsMaintM[Param]);
}
if (parametres.nomAD[Param] != nomADMem) {
genie.WriteStr(1, parametres.nomAD[Param]);
}
//on met les valeurs en mémoire pour comparaison avec le cycle suivant
talMeFMem = parametres.talMeF[Param];
talStopMem = parametres.talStop[Param];
talMaintMem = parametres.talMaint[Param];
tpsMeFMMem = parametres.tpsMeFM[Param];
tpsStopMMem = parametres.tpsStopM[Param];
tpsMaintMMem = parametres.tpsMaintM[Param];
nomADMem = parametres.nomAD[Param];
Val = 0;
}
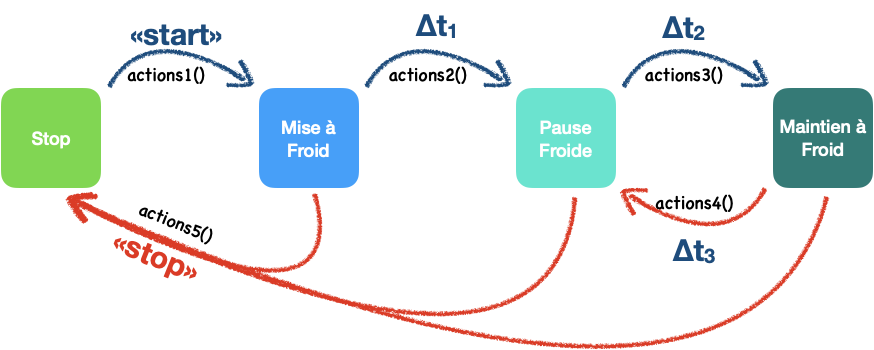
//définition des temps de travail des EV:
for (int i = 0; i < 4; i++) {
if (Mode[i] == 1) { //si le mode auto est sélectionné pour les 4 EV.
if (Dem[i] < 6) { // si le profil correspond au circuit 1, on fait les calculs avec la pression 1
tpsMeF[i] = (-tempCalcul / (-PressionCalcul[0] + 12.59815)) + parametres.talMeF[Dem[i]];
tpsStop[i] = ((-tempCalcul + chauffeCapteur) / (-PressionCalcul[0] + 12.59815)) + parametres.talStop[Dem[i]];
tpsMaint[i] = ((-tempCalcul + chauffeCapteur) / (-PressionCalcul[0] + 12.59815)) + parametres.talMaint[Dem[i]];
} else if (Dem[i] > 5 && Dem[i] < 11) { // si le profil correspond au circuit 2 , on fait les calculs avec la pression 2
tpsMeF[i] = (-tempCalcul / (-PressionCalcul[1] + 12.59815)) + parametres.talMeF[Dem[i]];
tpsStop[i] = ((-tempCalcul + chauffeCapteur) / (-PressionCalcul[1] + 12.59815)) + parametres.talStop[Dem[i]];
tpsMaint[i] = ((-tempCalcul + chauffeCapteur) / (-PressionCalcul[1] + 12.59815)) + parametres.talMaint[Dem[i]];
} else if (Dem[i] > 10 && Dem[i] < 16) { // si le profil correspond au circuit 3 , on fait les calculs avec la pression 3
tpsMeF[i] = (-tempCalcul / (-PressionCalcul[2] + 12.59815)) + parametres.talMeF[Dem[i]];
tpsStop[i] = ((-tempCalcul + chauffeCapteur) / (-PressionCalcul[2] + 12.59815)) + parametres.talStop[Dem[i]];
tpsMaint[i] = ((-tempCalcul + chauffeCapteur) / (-PressionCalcul[2] + 12.59815)) + parametres.talMaint[Dem[i]];
} else if (Dem[i] > 15 && Dem[i] < 21) { // si le profil correspond au circuit 4, on fait les calculs avec la pression 4
tpsMeF[i] = (-tempCalcul / (-PressionCalcul[3] + 12.59815)) + parametres.talMeF[Dem[i]];
tpsStop[i] = ((-tempCalcul + chauffeCapteur) / (-PressionCalcul[3] + 12.59815)) + parametres.talStop[Dem[i]];
tpsMaint[i] = ((-tempCalcul + chauffeCapteur) / (-PressionCalcul[3] + 12.59815)) + parametres.talMaint[Dem[i]];
}
} else {
tpsMeF[i] = parametres.tpsMeFM[Dem[i]];
tpsStop[i] = parametres.tpsStopM[Dem[i]];
tpsMaint[i] = parametres.tpsMaintM[Dem[i]];
}
//fonctionnement EV:
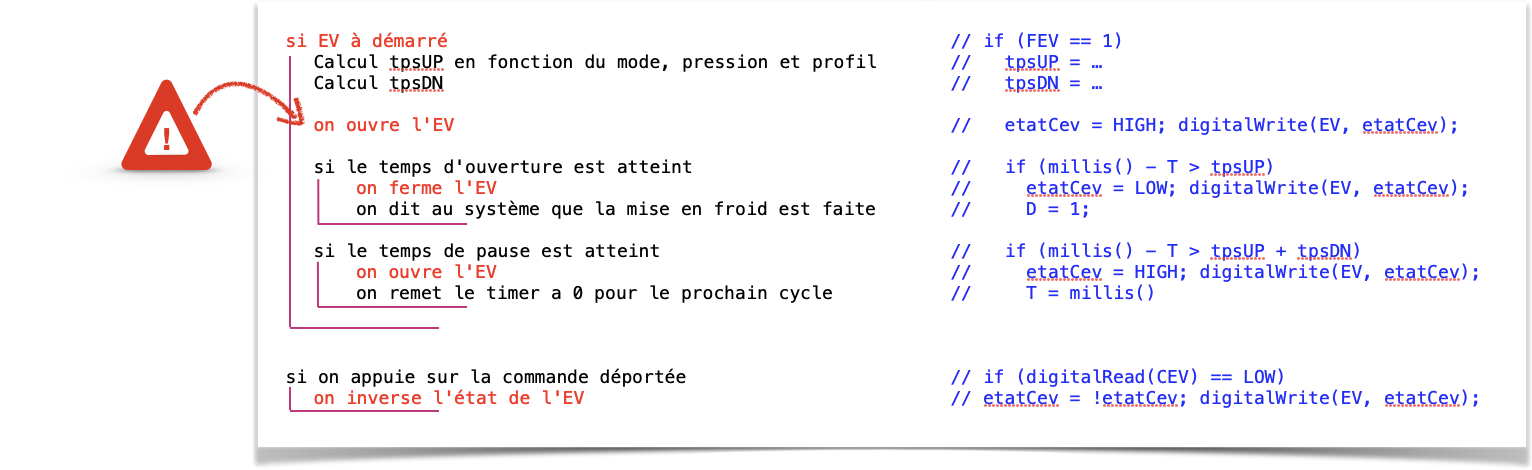
if (FEV[i] == 1 ) { //si EV 1 à 4 à démarré
if (((Mode[i] == 1) && (pression1[i] >= 135) && (Dem[i] != 0)) || ((Mode[i] == 0) && (Dem[i] != 0))) { //si mode auto ET pression >=135 bars ET profile sélectionné OU mode manu et profil sélectionné
if (D[i] == 0) { //si la mise en froid n'est pas réalisée
tpsUP[i] = tpsMeF[i] * 1000; // on utilise le temps de mise en froid
} else {
tpsUP[i] = tpsMaint[i] * 1000; //sinon on utilise le temps de maintien froid
}
tpsDN[i] = tpsStop[i] * 1000;
etatCev[i] = HIGH;
digitalWrite(EV[i], etatCev[i]); //on ouvre l'EV
if (millis() - T[i] > tpsUP[i]) { //si le temps d'ouverture est atteint
etatCev[i] = LOW; // on ferme l'EV
digitalWrite(EV[i], etatCev[i]);
D[i] = 1; // on dit au systeme que la mise en froid est faite
}
if (millis() - T[i] > tpsUP[i] + tpsDN[i]) { // si le temps de pause est atteint
etatCev[i] = HIGH;
digitalWrite(EV[i], etatCev[i]); //on reouvre l'EV
T[i] = millis(); //on remet le timer a 0 pour le prochain cycle
}
}
} else {
etatCev[i] = LOW; // sinon on referme les EV
digitalWrite(EV[i], etatCev[i]);
}
}
//utilisation cde EV déportée:
for (int i = 0; i < 8; i++) {
cdev[i] = digitalRead(CEV[i]);
if (cdev[i] != cdevPrecedent[i]) {
if (cdev[i] == LOW) { //si on appuie sur une commande déportée
etatCev[i] = !etatCev[i]; // on inverse l'état de la commande de l'EV correspondante
digitalWrite(EV[i], etatCev[i]);
}
cdevPrecedent[i] = cdev[i];
delay(20);
}
}
} |










Envoyé par Jay M

 Répondre avec citation
Répondre avec citation



Partager