









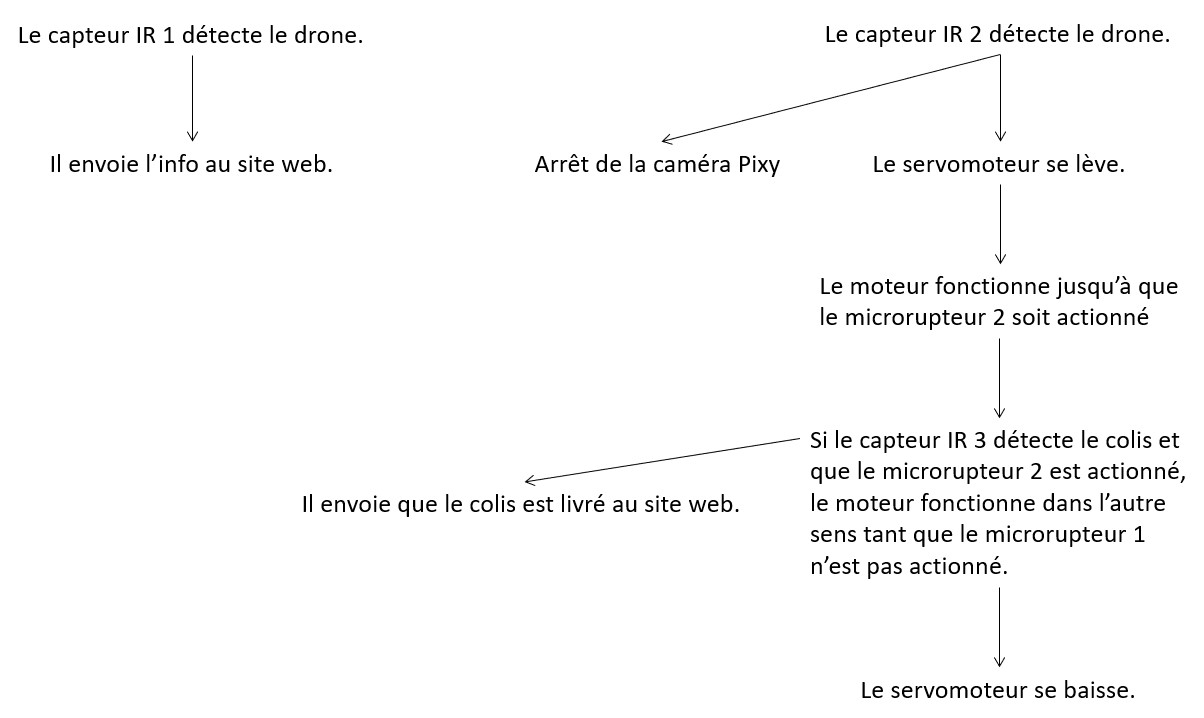
Bonjour, j'ai un projet à faire en classe et je n'arrive pas à faire fonctionner mon programme correctement, j'ai fait un schéma pour expliquer ce que je dois faire.
Je mets mon code en dessous.
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
 Répondre avec citation
Répondre avec citation





 N'oubliez pas le bouton
N'oubliez pas le bouton  et pensez aux balises [code]
et pensez aux balises [code]





Partager