1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
|
#include <stdio.h>
#include <stdlib.h>
#include <windows.h>
#include <winbase.h>
#include <conio.h>
#include <string.h>
void main(void)
{
int Erreur;
Erreur = InitCom("\\\\.\\COM50", "Aucune", "9600", "8", "1");
if (Erreur!=0) //périphérique initialisé correctement
{
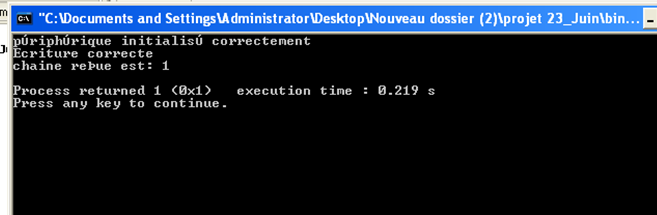
printf("périphérique initialisé correctement \n");
//Envoie de la chaine
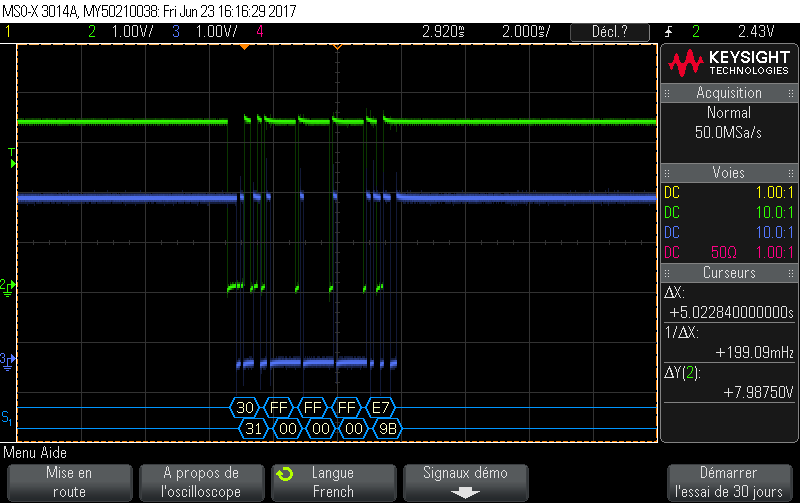
EnvoiChainePort("82 FF FF FF", "\\\\.\\COM50");
// recevoir le chaine lus
RecevoirPort ("\\\\.\\COM50");
}
else
{
printf("Erreur lors de la configuration %d. \n", GetLastError());
}
}
/*Configuration du port série */
int InitCom( char *pcCommPort, char *Parite, char *Vitesse, char *TailleData, char *StopBit)
{
//Initialisation
DCB dcb;
HANDLE hCom;
BOOL fSuccess; // Tout est bien passé
//Ouverture du port Comm
hCom= CreateFile ( pcCommPort,
GENERIC_READ|GENERIC_WRITE, //accés lecture/ecriture
0, //pas de partage possible du port une fois ouvert
NULL, //pas d'héritage
OPEN_EXISTING, //doit etre open_existing
0, // pas d'overlopped I/O
NULL //hTemplate doit etre null
);
// Vérifier si handle ouvre correctement
if (hCom ==INVALID_HANDLE_VALUE)
{
//Manipuler l'erreur
printf("Create file failed with error %d\n", GetLastError());
return (1);
}
//Lecture de configuration initiale
fSuccess = GetCommState (hCom, &dcb);
if (!fSuccess)
{
//Manipuler l'erreur
printf("GetCommState failed with error %d\n", GetLastError());
return (2);
}
//Configuration du port
dcb.BaudRate= atoi(Vitesse); // gestion de vitesse . atoi:Convertir String to integer
dcb.ByteSize= atoi(TailleData); //gestion de la taille
/*Gestion de la partité*/
if (strcmp (Parite, "Aucune")==0) //strcmp : si égaux renvoie 0
dcb.Parity=NOPARITY; // pas de parité
if (strcmp (Parite, "Paire")==0)
dcb.Parity=EVENPARITY;
if (strcmp (Parite, "Impaire")==0)
dcb.Parity=ODDPARITY;
/* Gestion bit de Stop*/
if (strcmp (StopBit, "1")==0)
dcb.StopBits= ONESTOPBIT; // 1 bit stop
if (strcmp (StopBit, "1.5")==0)
dcb.StopBits= ONE5STOPBITS; // 1.5 bit stop
if (strcmp (StopBit, "2")==0)
dcb.StopBits= TWOSTOPBITS; // 2 bit stop
//Configurer le port
fSuccess = SetCommState(hCom, &dcb);
if (!fSuccess)
{
//Manipuler l'erreur
printf("SetCommState failed with error %d\n", GetLastError());
return (3);
}
//Fermer le port
CloseHandle(hCom);
return (fSuccess);
}
/*Ecriture sur un port série */
int EnvoiChainePort(char *chaine, char *pcCommPort)
{
HANDLE hCom;
BOOL fSuccess;
int NbOctet;
unsigned long nBytesWrite;
// Ouverture du port de communication
hCom= CreateFile ( pcCommPort,
GENERIC_READ|GENERIC_WRITE, //accés lecture/ecriture
0, //pas de partage possible du port une fois ouvert
NULL, //pas d'héritage
OPEN_EXISTING, //doit etre open_existing
0, // pas d'overlopped I/O
NULL //hTemplate doit etre null
);
NbOctet= strlen(chaine);
//Ecrire dans le fichier
WriteFile(hCom,chaine, 4, &nBytesWrite, NULL);
//Fermer le handle de Com
CloseHandle(hCom);
return fSuccess;
}
/* Lecture sur un port série */
BOOL RecevoirPort (char *pcCommPort)
{
DCB dcb;
HANDLE hCom;
BOOL fSuccess;
BOOL bResult;
COMMTIMEOUTS tTimeout;
char *inBuffer="NULL";
int TimeoutRead;
unsigned long nBytesRead;
// Initialisation des variables
inBuffer= malloc(200); // Réservation mémoire pour le buffer de récéption
nBytesRead=0;
// Ouverture du port de communication
hCom= CreateFile ( pcCommPort,
GENERIC_READ|GENERIC_WRITE, //accés lecture/ecriture
0, //pas de partage possible du port une fois ouvert
NULL, //pas d'héritage
OPEN_EXISTING, //doit etre open_existing
0, // pas d'overlopped I/O
NULL //hTemplate doit etre null
);
//Définition des timeouts
TimeoutRead=500; // timeout de 1000ms
tTimeout.ReadIntervalTimeout= MAXWORD;
tTimeout.ReadTotalTimeoutMultiplier=0;
tTimeout.ReadTotalTimeoutConstant=TimeoutRead;
tTimeout.WriteTotalTimeoutMultiplier=0;
tTimeout.WriteTotalTimeoutConstant=0;
//Configuration du Timeout
SetCommTimeouts(hCom, &tTimeout);
/* Boucle d'attente de lecture des octets */
bResult=ReadFile(hCom, inBuffer, 4096, &nBytesRead, NULL); //4096: maximum of bytes to be read
if (nBytesRead<=0) // pas des octets lus
printf("Buffer est vide: %s", inBuffer);
else
printf(" Chaine reçue est : %s", inBuffer); //Retourner la choine reçue.
//fermer le port
CloseHandle(hCom);
//Libérer la mémoire
free(inBuffer);
return (fSuccess);
} |













 Répondre avec citation
Répondre avec citation





Partager