









Bonjour,
Je cherche à développer une application de localisation dans les réseaux de capteurs, une partie de cette application est basée sur un algorithme de sélection des nuds.
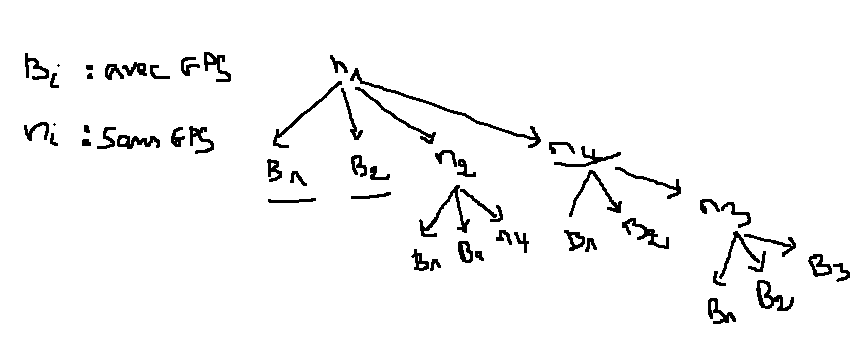
Au début plusieurs capteurs sans fils (nuds) sont dispersés aléatoirement dans une zone géographiques. Parmi ces nuds il existe quelques uns qui connaissent leurs positions (équipes de GPS) et contribuent à l'estimation de la position des autres.
Ensuite chaque nud envoie une requête de localisation et reçoit plusieurs réponses provenant des nuds équipes de GPS et des autres qui ont déjà estimé leurs positions.
Pour une estimation de bonne précision, je choisi en priorité les réponses provenant des nuds GPS suivi des nuds qui ont servi directement des nuds GPS suivi des autres avec un intermédiaire (sans GPS) de plus et ainsi de suite.
l'erreur d'estimation s'accumule à chaque fois qu'on utilise un nuds non équipe de GPS.
voila un exemple qui illustre la selection :
le nud n1 a reçu 4 réponse provenant de B1 , B2 , n2 et n4, l'estimation nécessite 3 nuds donc je choisi B1 , B2 (sans erreurs) et n4 (n4 a un niveau de moins par rapport n3).
Je veux attribuer un poids à chaque nud, à base duquel je sélectionne les nuds.
toute remarque sera la bienvenue.
Cordialement
E. Bazoga
 Répondre avec citation
Répondre avec citation
Partager