










Les robots bipèdes entraînés à la marche dynamique sur terrains accidentés
Grâce à lapprentissage assisté par ordinateur
La question de la traversée des tremplins avec des robots bipèdes a été largement étudiée et a conduit à des résultats vraiment impressionnants sur certains robots comme Atlas, robot humanoïde de Google. Mais jusquà présent, ces robots utilisent des mouvements quasi statiques et plus lents. Ce qui ne répondait pas à la préoccupation des appuis discrets comme la marche sur des gravats ou la traversée de tremplins. Le développement de la capacité des robots bipèdes à traverser des terrains discrets et imprévisibles les rendra opérationnels pour des applications telles que l'exploration spatiale, la réponse aux catastrophes et laide en milieu urbain nécessitant des locomotives robotisées sur des terrains discrets conçus pour les humains.
Cependant, les chercheurs de l'Hybrid Robotics Group à l'Université de Californie à Berkeley et de l'Université Carnegie Mellon auraient résolu ce problème par leurs méthodes qui permettent la marche dynamique en opposition à la marche quasi statique utilisée jusquà présent.
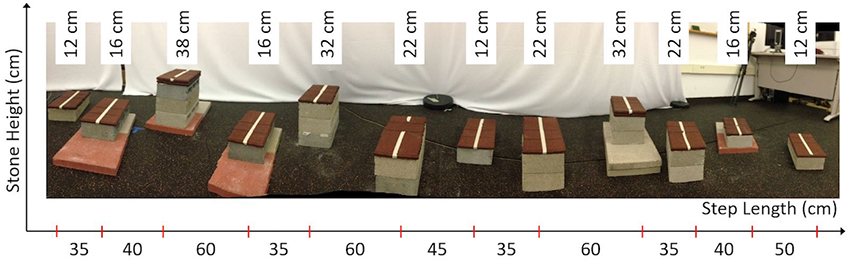
Se basant sur des méthodes dapprentissage assisté par ordinateur et le robot ATRIAS, robot bipède développé par les chercheurs du Dynamic Robotics Laboratory de l'University de lOregon, les chercheurs ont exploité les progrès récents dans les systèmes de contrôle optimaux et non linéaires pour démontrer une marche dynamique sur les tremplins, même lorsque la distance entre les pierres et leur hauteur varient au hasard. Ils ont appris ainsi au robot bipède à traverser des tremplins, ce qui est un succès qui navait pas encore été réalisé jusquà présent.
« Ce qui est différent dans nos méthodes, c'est qu'elles permettent une marche dynamique, par opposition aux mouvements quasi statiques plus lents que les robots ont tendance à utiliser », ont écrit les chercheurs. « En raisonnant sur les non linéarités de la dynamique du système et en profitant des progrès récents de la technologie de contrôle optimale et non linéaire, nous pouvons spécifier les objectifs de contrôle et les comportements souhaités du robot sous une forme simple et compacte. Cela signifie que nos robots peuvent marcher sur un terrain discret sans glisser ni tomber, soutenus par des maths soignées et de belles vidéos expérimentales », ont-ils ajouté.
« Au sein de l'Hybrid Robotics Group à l'UC Berkeley, nous avons travaillé sur l'élaboration de cadres formels de contrôle pour robots bipèdes haut degré de liberté qui garantissent non seulement le placement de pas précis sur un terrain discret, mais sont aussi robustes comme modèles pour des terrains incertains », ont écrit les chercheurs.
Maintenant que la marche dynamique est assurée, les chercheurs travaillent à passer à une autre étape qui est de permettre à leurs robots dutiliser lentrée visuelle afin de prendre des informations sur leur environnement, comme l'emplacement du prochain tremplin, car à létape actuelle, ils sont « aveugles ». Toutefois, avec le robot CASSIE, ils pourront voir et sentir les pierres lors de leur déplacement et pourront améliorer leur marche.
Cette technologie peut être utilisée également dans l'exploration de zones non cartographiées, cest-à-dire non encore explorées comme sur d'autres planètes, où la surface peut être très accidentée.
Source : IEEE Spectrum
Et vous ?
Que pensez-vous de cette nouvelle étape franchie dans le développement des robots bipèdes ?
Voir aussi
 Répondre avec citation
Répondre avec citation
Partager