1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
| /**
* \file
*
* \brief SAM D20 SAM-BA Bootloader
*
* Copyright (c) 2014 Atmel Corporation. All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions are met:
*
* 1. Redistributions of source code must retain the above copyright notice,
* this list of conditions and the following disclaimer.
*
* 2. Redistributions in binary form must reproduce the above copyright notice,
* this list of conditions and the following disclaimer in the documentation
* and/or other materials provided with the distribution.
*
* 3. The name of Atmel may not be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* 4. This software may only be redistributed and used in connection with an
* Atmel microcontroller product.
*
* THIS SOFTWARE IS PROVIDED BY ATMEL "AS IS" AND ANY EXPRESS OR IMPLIED
* WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF
* MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NON-INFRINGEMENT ARE
* EXPRESSLY AND SPECIFICALLY DISCLAIMED. IN NO EVENT SHALL ATMEL BE LIABLE FOR
* ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL
* DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS
* OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION)
* HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT,
* STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
* ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
* POSSIBILITY OF SUCH DAMAGE.
*
*/
/**
* --------------------
* SAM-BA Implementation on SAMD20
* --------------------
* Requirements to use SAM-BA :
*
* Supported communication interfaces :
* --------------------
*
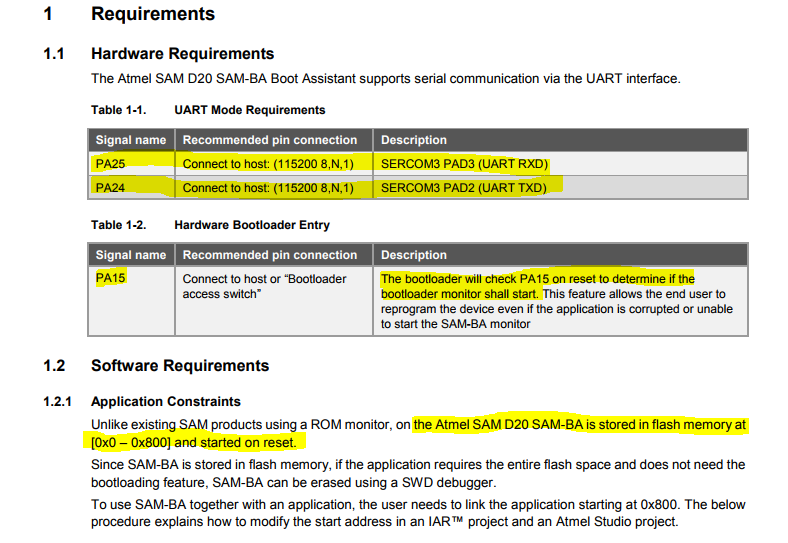
* SERCOM3 : TX:PA24 RX:PA25
* Baudrate : 115200 8N1
*
* Pins Usage
* --------------------
* The following pins are used by the program :
* PA25 : input
* PA24 : output
* PA15 : input
*
* The application board shall avoid driving the PA25,PA24 and PA15 signals
* while the boot program is running (after a POR for example)
*
* Memory Mapping
* --------------------
* SAM-BA code will be located at 0x0 and executed before any applicative code.
*
* Applications compiled to be executed along with the bootloader will start at
* 0x800
* Before jumping to the application, the bootloader changes the VTOR register
* to use the interrupt vectors of the application @0x800.<- not required as
* application code is taking care of this
*
*/
#include "samd20.h"
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include "conf_bootloader.h"
#include "sam_ba_monitor.h"
#include "usart_sam_ba.h"
static void check_start_application(void);
/**
* \brief Check the application startup condition
*
*/
static void check_start_application(void)
{
uint32_t app_start_address;
/* Load the Reset Handler address of the application */
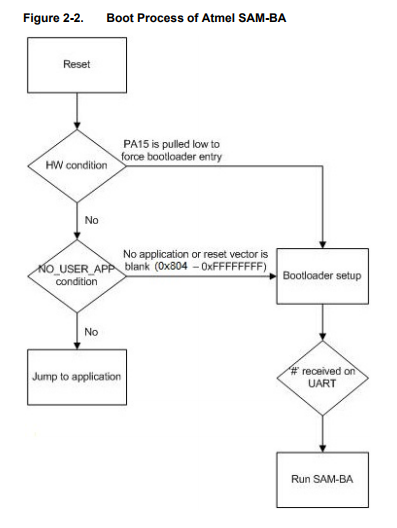
app_start_address = *(uint32_t *)(APP_START_ADDRESS + 4);
/**
* Test reset vector of application @APP_START_ADDRESS+4
* Stay in SAM-BA if *(APP_START+0x4) == 0xFFFFFFFF
* Application erased condition
*/
if (app_start_address == 0xFFFFFFFF) {
/* Stay in bootloader */
return;
}
volatile PortGroup *boot_port = (volatile PortGroup *)(&(PORT->Group[BOOT_LOAD_PIN / 32]));
volatile bool boot_en;
/* Enable the input mode in Boot GPIO Pin */
boot_port->DIRCLR.reg = GPIO_BOOT_PIN_MASK;
boot_port->PINCFG[BOOT_LOAD_PIN & 0x1F].reg = PORT_PINCFG_INEN | PORT_PINCFG_PULLEN;
boot_port->OUTSET.reg = GPIO_BOOT_PIN_MASK;
/* Read the BOOT_LOAD_PIN status */
boot_en = (boot_port->IN.reg) & GPIO_BOOT_PIN_MASK;
/* Check the bootloader enable condition */
if (!boot_en) {
/* Stay in bootloader */
return;
}
/* Rebase the Stack Pointer */
__set_MSP(*(uint32_t *) APP_START_ADDRESS);
/* Rebase the vector table base address */
SCB->VTOR = ((uint32_t) APP_START_ADDRESS & SCB_VTOR_TBLOFF_Msk);
/* Jump to application Reset Handler in the application */
asm("bx %0"::"r"(app_start_address));
}
#if DEBUG_ENABLE
# define DEBUG_PIN_HIGH PORT->Group[0].OUTSET.reg=(1u<<BOOT_LED)
# define DEBUG_PIN_LOW PORT->Group[0].OUTCLR.reg=(1u<<BOOT_LED)
#else
# define DEBUG_PIN_HIGH do{}while(0)
# define DEBUG_PIN_LOW do{}while(0)
#endif
/**
* \brief SAMD20 SAM-BA Main loop.
* \return Unused (ANSI-C compatibility).
*/
int main(void)
{
#if DEBUG_ENABLE
/* Set BOOT_LED pin as output */
PORT->Group[0].DIRSET.reg=(1u<<BOOT_LED);
#endif
DEBUG_PIN_HIGH;
/* Jump in application if condition is satisfied */
check_start_application();
/* Make OSC8M prescalar to zero rather divide by 8 */
SYSCTRL->OSC8M.bit.PRESC = 0;
/* UART is enabled in all cases */
usart_open();
DEBUG_PIN_LOW;
/* Wait for a complete enum on usb or a '#' char on serial line */
while (1) {
/* Check if a '#' has been received */
if (usart_sharp_received()) {
sam_ba_monitor_init(SAM_BA_INTERFACE_USART);
/* SAM-BA on UART loop */
while(1) {
sam_ba_monitor_run();
}
}
}
} |











")
 Répondre avec citation
Répondre avec citation








 )
)


Partager