1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
|
import ij.IJ;
import ij.ImagePlus;
import ij.gui.GenericDialog;
import ij.plugin.filter.PlugInFilter;
import ij.process.ByteProcessor;
import ij.process.ImageProcessor;
import java.util.ArrayList;
import java.util.Iterator;
import java.util.List;
/**
* Harris Corner Detector
*
* @author Xavier Philippeau
*
*/
public class Harris_ implements PlugInFilter {
// corners list
List<int[]> corners = new ArrayList<int[]>();
// halfwindow size (integration, kernels)
private int halfwindow = 0;
// variance of gaussians
private double gaussiansigma = 0;
// corner filtering
private int minDistance = 0;
private int minMeasure = 0;
// Gradient kernel
GradientVector gradient = new GradientVector();
// About...
private void showAbout() {
IJ.showMessage("Harris...","Harris Corner Detector by Pseudocode");
}
public int setup(String arg, ImagePlus imp) {
// about...
if (arg.equals("about")) {
showAbout();
return DONE;
}
// else...
if (imp==null) return DONE;
// Configuration dialog.
GenericDialog gd = new GenericDialog("Parameters");
gd.addNumericField("Half-Window size",1,0);
gd.addNumericField("Gaussian sigma",1.4,1);
gd.addNumericField("Min Harris measure for corners",10,0);
gd.addNumericField("Min distance between corners",8,0);
int halfwindow = 0;
double gaussiansigma = 0;
int minMeasure = 0;
int minDistance = 0;
while(true) {
gd.showDialog();
if ( gd.wasCanceled() ) return DONE;
halfwindow = (int) gd.getNextNumber();
gaussiansigma = (double) gd.getNextNumber();
minMeasure = (int) gd.getNextNumber();
minDistance = (int) gd.getNextNumber();
if (halfwindow<=0) continue;
if (gaussiansigma<=0) continue;
if (minMeasure<0) continue;
if (minDistance<0) continue;
break;
}
gd.dispose();
this.halfwindow = halfwindow;
this.gaussiansigma = gaussiansigma;
this.minMeasure = minMeasure;
this.minDistance = minDistance;
return PlugInFilter.DOES_8G;
}
public void run(ImageProcessor ip) {
// ImageProcessor -> ByteProcessor conversion
ByteProcessor bp = new ByteProcessor(ip.getWidth(),ip.getHeight());
for (int y = 0; y < ip.getHeight(); y++) {
for (int x = 0; x < ip.getWidth(); x++) {
bp.set(x,y,ip.getPixel(x,y));
}
}
// canny filter
ByteProcessor newbp = filter( bp, this.minMeasure, this.minDistance );
// ByteProcessor -> ImageProcessor conversion
ImageProcessor out = new ByteProcessor(ip.getWidth(),ip.getHeight());
for (int y = 0; y < ip.getHeight(); y++) {
for (int x = 0; x < ip.getWidth(); x++) {
out.set(x,y,newbp.get(x,y));
}
}
ImagePlus newImg = new ImagePlus("Canny Filter Result", out);
newImg.show();
}
// -------------------------------------------------------------------------
/**
* Gaussian window function
*
* @param x x coordinates
* @param y y coordinates
* @param sigma2 variance
* @return value of the function
*/
private double gaussian(double x, double y, double sigma2) {
double t = (x*x+y*y)/(2*sigma2);
double u = 1.0/(2*Math.PI*sigma2);
double e = u*Math.exp( -t );
return e;
}
/**
* compute harris measure for a pixel
*
* @param c Image map
* @param x x coord of the computation
* @param y y coord of the computation
* @return harris measure
*/
private double harrisMeasure(ByteProcessor c, int x, int y) {
double m00=0, m01=0, m10=0, m11=0;
// Harris estimator
// ----------------
//
// k = det(A) - lambda * trace(A)^2
//
// Where A is the second-moment matrix
//
// | Lx²(x+dx,y+dy) Lx.Ly(x+dx,y+dy) |
// A = Sum | | * Gaussian(dx,dy)
// dx,dy | Lx.Ly(x+dx,y+dy) Ly²(x+dx,y+dy) |
//
// and lambda = 0.06 (totaly empirical :-)
for(int dy=-halfwindow;dy<=halfwindow;dy++) {
for(int dx=-halfwindow;dx<=halfwindow;dx++) {
int xk = x + dx;
int yk = y + dy;
if (xk<0 || xk>=c.getWidth()) continue;
if (yk<0 || yk>=c.getHeight()) continue;
// gradient value
double[] g = gradient.getVector(c,xk,yk);
double gx = g[0];
double gy = g[1];
// gaussian window
double gw = gaussian(dx,dy,gaussiansigma);
// second-moment matrix elements
m00 += gx * gx * gw;
m01 += gx * gy * gw;
m10 = m01;
m11 += gy * gy * gw;
}
}
// Harris corner measure
double harris = m00*m11 - m01*m10 - 0.06*(m00+m11)*(m00+m11);
// scaled down
return harris/(256*256);
}
/**
* return the the measure at pixel (x,y) if the pixel is a spatial Maxima, else return -1
*
* @param c original image
* @param x x coordinates of pixel
* @param y y coordinates of pixel
* @return the measure if the pixel is a spatial Maxima, else -1
*/
private double spatialMaximaofHarrisMeasure(ByteProcessor c, int x, int y) {
int n=8;
int[] dx = new int[] {-1,0,1,1,1,0,-1,-1};
int[] dy = new int[] {-1,-1,-1,0,1,1,1,0};
double w = harrisMeasure(c,x,y);
for(int i=0;i<n;i++) {
double wk = harrisMeasure(c,x+dx[i],y+dy[i]);
if (wk>=w) return -1;
}
return w;
}
/**
* Perfom Harris Corner Detection
*
* @param c Image map
* @param tilesize size of a tile
* @param nmbmax max number of corner to keep
* @return filtered image map
*/
public ByteProcessor filter(ByteProcessor c, int minMeasure, int minDistance) {
int width = c.getWidth();
int height = c.getHeight();
// copy of the original image (at little darker)
ByteProcessor c2 = new ByteProcessor(width,height);
for (int y=0; y<height; y++)
for (int x=0; x<width; x++)
c2.set(x,y,(int)(c.get(x,y)*0.80));
// for each tile in the image
for (int y=0; y<height; y++) {
for (int x=0; x<width; x++) {
// harris measure
int h = (int)spatialMaximaofHarrisMeasure(c, x, y);
// add the corner to the list
if (h>=minMeasure) corners.add( new int[]{x,y,h} );
}
}
// remove corners to close to each other (keep the highest measure)
Iterator<int[]> iter = corners.iterator();
while(iter.hasNext()) {
int[] p = iter.next();
for(int[] n:corners) {
if (n==p) continue;
int dist = (int)Math.sqrt( (p[0]-n[0])*(p[0]-n[0])+(p[1]-n[1])*(p[1]-n[1]) );
if( dist>minDistance) continue;
if (n[2]<p[2]) continue;
iter.remove();
break;
}
}
// Display corners over the image (cross)
for (int[] p:corners) {
for (int dx=-2; dx<=2; dx++) {
if (p[0]+dx<0 || p[0]+dx>=width) continue;
c2.set(p[0]+dx,p[1],255);
}
for (int dy=-2; dy<=2; dy++) {
if (p[1]+dy<0 || p[1]+dy>=height) continue;
c2.set(p[0],p[1]+dy,255);
}
//System.out.println("corner found at: "+p[0]+","+p[1]+" ("+p[2]+")");
}
return c2;
}
public class GradientVector {
int halfwindow = 1; // 3x3 kernel
double sigma2 = 1.4;
double[][] kernelGx = new double[2*halfwindow+1][2*halfwindow+1];
double[][] kernelGy = new double[2*halfwindow+1][2*halfwindow+1];
// Constructor
public GradientVector() {
for(int y=-halfwindow;y<=halfwindow;y++) {
for(int x=-halfwindow;x<=halfwindow;x++) {
kernelGx[halfwindow+y][halfwindow+x] = Gx(x, y);
kernelGy[halfwindow+y][halfwindow+x] = Gy(x, y);
}
}
}
// Kernel functions (gaussian 1st order partial derivatives)
private double Gx(int x, int y) {
double t = (x*x+y*y)/(2*sigma2);
double d2t = -x / sigma2;
double e = d2t * Math.exp( -t );
return e;
}
private double Gy(int x, int y) {
double t = (x*x+y*y)/(2*sigma2);
double d2t = -y / sigma2;
double e = d2t * Math.exp( -t );
return e;
}
// return the Gradient Vector for pixel(x,y)
public double[] getVector(ByteProcessor c, int x, int y) {
double gx=0, gy=0;
for(int dy=-halfwindow;dy<=halfwindow;dy++) {
for(int dx=-halfwindow;dx<=halfwindow;dx++) {
int xk = x + dx;
int yk = y + dy;
double vk = c.getPixel(xk,yk); // <-- value of the pixel
gx += kernelGx[halfwindow-dy][halfwindow-dx] * vk;
gy += kernelGy[halfwindow-dy][halfwindow-dx] * vk;
}
}
double[] gradientVector = new double[] { gx, gy };
return gradientVector;
}
}
} |













Envoyé par mobi_bil

 Répondre avec citation
Répondre avec citation
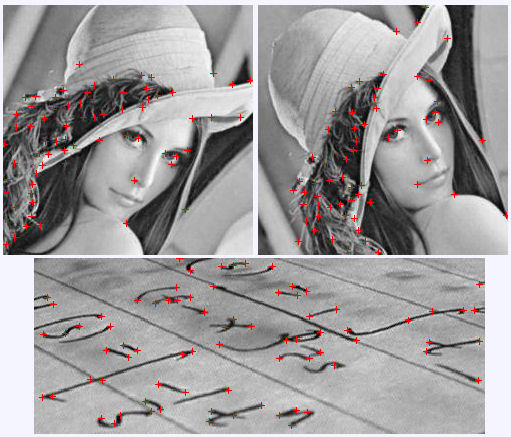
 que je vais utiliser pour la detection des points d'interet
que je vais utiliser pour la detection des points d'interet






Partager