











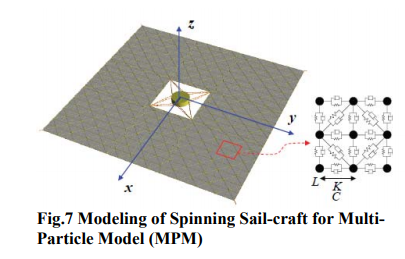
Approche de modélisation :
Je modélise sur Matlab-Simulink une structure flexible très fine. Tous les points du modèle sont reliés entre eux par des ressorts et des amortisseurs de cette façon (sans les attaches au centre):
L'équation générale de mon modèle appliquée à chaque point du maillage est la suivante:
Avec k la rigidité des ressorts, et c l'amortissement des amortisseurs.
Pour adapter les propriétés physiques du matériau que je veux modéliser, la rigidité du ressort a été fixée à une valeur très élevée, autour de k = 5000. Cela signifie que mes liens à ressort sont très réactifs à toute déformation.
Problème :
Ceci mène à mon problème : les liens à haute rigidité induisent un déplacement à haute fréquence que je peux considérer comme du bruit dans la simulation.
- La simulation est beaucoup plus lente car le pas de temps variable que j'utilise doit être très faible.
- Ces déplacements à haute fréquence (autour de 160 Hz, qui est la fréquence de résonance des ressorts) restent tout au long des simulations.
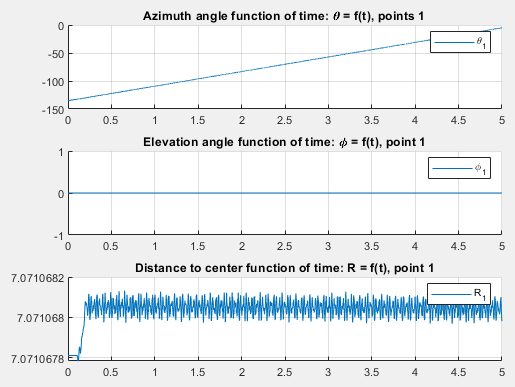
Voici une simulation de ma structure tournant à une vitesse angulaire constante :
On peut voir que R vibre à une fréquence très élevée. Cependant, l'amplitude du déplacement est clairement négligeable.
Pour accélérer la simulation, je veux supprimer ces vibrations !
Investigation :
Pour les supprimer, j'étudie les techniques de filtrage du signal, principalement le filtrage passe-bas. A chaque boucle de notre simulation, et ce qui doit entrer dans notre filtre sont les données de tous mes points dans tous mes axes.
La version continue du filtre passe-bas de la bibliothèque Simulink a été testée sur l'accélération, la vitesse et la position, avec plusieurs fréquences de coupure de 100 Hz à 500 Hz.
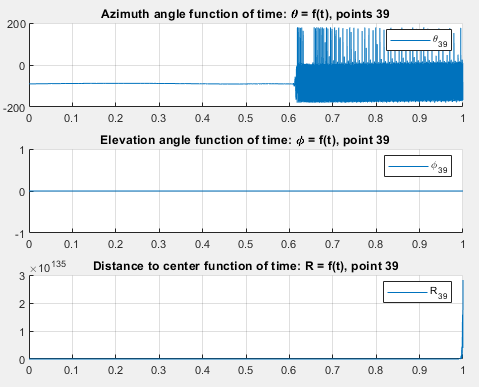
Par exemple, pour une fréquence de coupure de 200Hz et en filtrant la position à t=0.6 sec j'ai :
C'est un mouvement dans le plan donc je n'ai pas d'angle d'élévation, mais l'angle d'azimut et la distance du point au centre sont complètement divergents.
Slon moi, le problème peut provenir de :
- Le fait que je sois dans un système en boucle fermée.
- Le fait que pour mon maillage, le filtre reçoit 81 vecteurs de 3*1 à chaque pas de temps et peut-être que le bloc filtre n'est pas fait pour fonctionner avec cela.
Question principale :
- Existe-t-il des techniques de filtrage pour les systèmes en boucle fermée et à entrées multiples qui pourraient résoudre mon problème ?
Merci d'avance pour votre aide !

 Répondre avec citation
Répondre avec citation
Partager