1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
| #include <stdlib.h>
#include "StdAfx.h"
using namespace cv;
int main( )
{
int height,width,step,step_mono,channels;
/*Here i have declared step_mono for handling the widthstep member of a monochrome image*/
uchar *data,*data_mono; /*similarly data mono for handling the data of monochrome image*/
int i,j,k;
//Mat src;
Mat src_gray;
Mat grad;
char* window_name = "Sobel Demo - Simple Edge Detector";
int scale = 1;
int delta = 0;
int ddepth = CV_16S;
int c;
/// Load an image
IplImage* frame=cvLoadImage("D:/Entwicklung/OpenCV/2010/test threshold/Release/sobel.bmp",1);
if( frame == NULL )
{ return -1; }
Mat src(frame);
GaussianBlur(src, src, Size(3,3), 0, 0, BORDER_DEFAULT );
/// Convert it to gray
cvtColor( src, src_gray, CV_RGB2GRAY );
/// Create window
namedWindow( window_name, CV_WINDOW_AUTOSIZE );
/// Generate grad_x and grad_y
Mat grad_x, grad_y;
Mat abs_grad_x, abs_grad_y;
/// Gradient X
//Scharr( src_gray, grad_x, ddepth, 1, 0, scale, delta, BORDER_DEFAULT );
Sobel( src_gray, grad_x, ddepth, 1, 0, 3, scale, delta, BORDER_DEFAULT );
convertScaleAbs( grad_x, abs_grad_x );
/// Gradient Y
//Scharr( src_gray, grad_y, ddepth, 0, 1, scale, delta, BORDER_DEFAULT );
Sobel( src_gray, grad_y, ddepth, 0, 1, 3, scale, delta, BORDER_DEFAULT );
convertScaleAbs( grad_y, abs_grad_y );
/// Total Gradient (approximate)
addWeighted( abs_grad_x, 0.5, abs_grad_y, 0.5, 0, grad );
imshow( window_name, grad );
//waitKey(0);
//Resultat de grad dans IPL ....
//IplImage mono_thres=cvCreateImage( cvGetSize(frame), 8, 1 );
IplImage frame2(grad);
//Faire à la fin
IplImage* mono_thres=cvCreateImage( cvGetSize(&frame2), 8, 1 );
height = frame2.height; /*height is a member of IPLIMAGE structure and hence it comes handy like this in such situations, and same goes with below four statements*/
width = frame2.width;
step = frame2.widthStep;
step_mono = mono_thres->widthStep;
channels = frame2.nChannels; /*Number of channels in the image*/
data = (uchar *)frame2.imageData; /*Image is treated as as unsigned char data hence we use an unsigned char pointer to point to the same*/
cvNamedWindow("My Window", CV_WINDOW_AUTOSIZE );
data_mono = (uchar *)mono_thres-> imageData; /*data of mono image is handled by the data_mono*/
for(i=0;i < height;i++) for(j=0;j < width;j++) /*I am copying the first channel from the image in "frame" in the monochrome image with the help of this line below..*/
data_mono[i*step_mono+j*1+0]=data[i*step+j*channels+0];
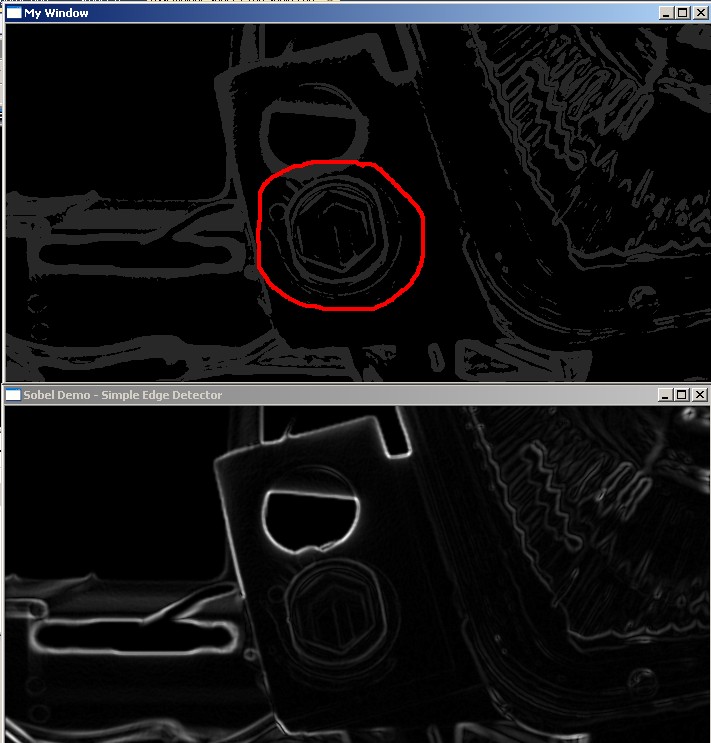
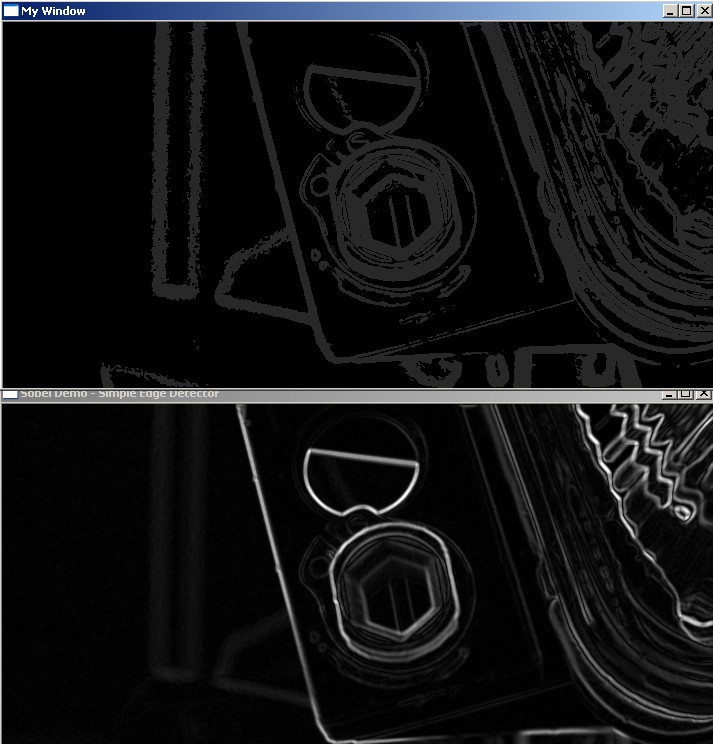
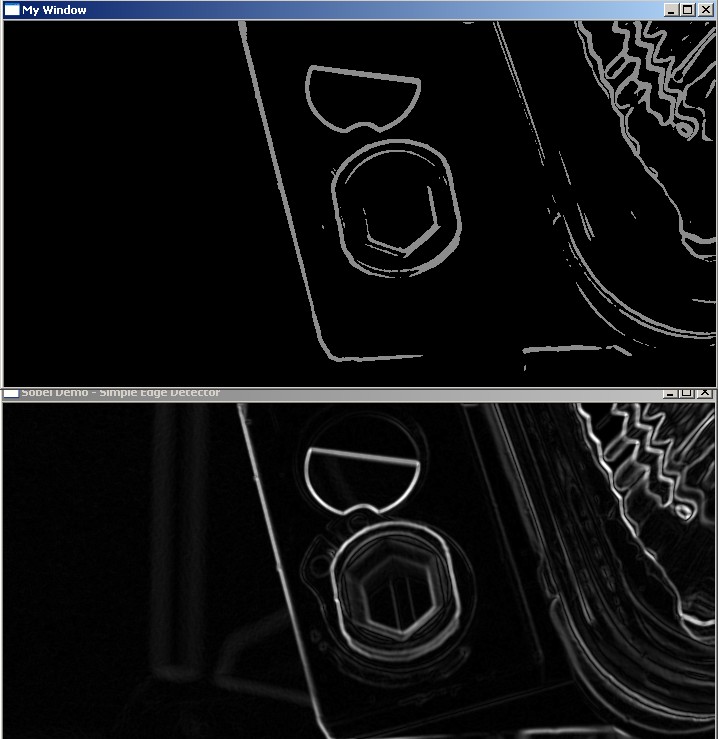
cvThreshold(mono_thres,mono_thres,12, /*70 is the lower cut off*/
40, /*this is the higher cut off*/
CV_THRESH_BINARY /*The type of thresholding,more description in the documentation*/
);
//imshow( window_name, grad );
cvShowImage("My Window",mono_thres);
waitKey(0);
cvDestroyWindow( "My Window" );
return 0;
} |










 Répondre avec citation
Répondre avec citation







 Par contre je ne dis pas que je n'aurais pas besoins de vous pour appliquer la transformée de Hough sur ma fonction!!!!
Par contre je ne dis pas que je n'aurais pas besoins de vous pour appliquer la transformée de Hough sur ma fonction!!!!

Partager