

Les segments qui relient l'oeil (qui a bougé ) à l'objet ( qui n'a pas bougé ) se coupent forcément à l'objet.
Inscrivez-vous gratuitement
pour pouvoir participer, suivre les réponses en temps réel, voter pour les messages, poser vos propres questions et recevoir la newsletter

 Discussion :
Discussion :






Les segments qui relient l'oeil (qui a bougé ) à l'objet ( qui n'a pas bougé ) se coupent forcément à l'objet.
Ce qui s'énonce clairement se conçoit bien ( Le hautbois)



Envoyé par Pecose

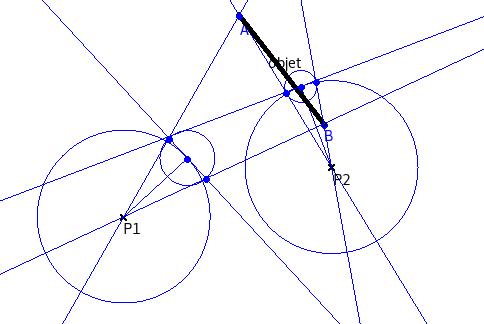
Ceci est doublement faux. Un zoom aboutira au même résultat que de modifier cette distance. Et même si on prend pour contrainte de garder le zoom identique, donc une distance identique, alors il y a quand même une infinité de cas possibles.
Voici le démenti en image :
Les points n'ont pas bougé, les photos sont identiques, la distance est constante et les objets sont différents.
Enfin, j'ajoute qu'assimiler l'objet à un segment est douteux. On ne peut pas travailler sur les points dans l'objet car ils pourraient bien se trouver derrière le segment et non dessus.
[edit] posts croisés [/edit]
Cette réponse vous apporte quelque chose ? Cliquez suren bas à droite du message.


En fait non, dans ce cas pas forcement, parce que la position de l'objet sur l'image n'est pas super précise.
Elle est calculer par un réseau de neurone.
Du coup, d'une image sur l'autre il ce peut qu'il y ai un léger décalage.
Des jours c'est facile, des jours c'est pas facile, mais c'est jamais le même jour.
Sur mon smartphone, j'ai un accéléromètre et un gyroscope, ce qui fait que j'ai la position mais aussi l'orientation.
Dans ton exemple tu modifie l'orientation des points de vue, du coup oui, on tombe sur un résultat différent à chaque fois.
Mais moi je n'aurai pas une orientation mole comme dans ton exemple.
Elle sera déterminer par les données de mon gyroscope.
Et pour le zoom tu as tout à fait raisons, je n'ai pas su trouver les mots pour l'expliquer.
Du coup je reprend tes mots:
Il faut garder un distance, un zoom et un orientation fixe.
Des jours c'est facile, des jours c'est pas facile, mais c'est jamais le même jour.



c'est léquation d'une droite dans un systeme 2D
une fonction que tu dois connaitre a partir du collège si mes souvenir sont correcte
le a correspondant au coefficient directeur de la droite et le b une constante
exemple => Pour léquation :
Y = 2x+ 3
si X = 1 | y = 2*1+3 = 5
si X = 3 | y = 2*3+3 = 9
si X = 7 | y = 2*7+3 = 17 ...
on peut donc dire que ta droite passe
Par les points (1,5) et (7,17)
Blaise PascalNous souhaitons la vérité et nous trouvons qu'incertitude. [...]
Nous sommes incapables de ne pas souhaiter la vérité et le bonheur, et sommes incapables ni de certitude ni de bonheur.
PS : n'oubliez pas le tag
J'me suis arrêter en troisième mais on peut pas vraiment dire que j'ai fait le collège...
J'ai plutôt fait une année de 64 et deux de Gamecube.
Merci pour ta une réponse très claire en tout cas.
Des jours c'est facile, des jours c'est pas facile, mais c'est jamais le même jour.
L'incertitude sur la position de l'image de l'objet sur le capteur entrainera une incertitude sur la distance.
Ce qui s'énonce clairement se conçoit bien ( Le hautbois)
Tout à fait juste, mais c'est pas grave.
Si je peux obtenir un distance incertaine ça me fait toujours une distance que je pourrai affinée plus tard.
Des jours c'est facile, des jours c'est pas facile, mais c'est jamais le même jour.


Tu disposes donc à priori:
a) des coordonnées (Xi,Yi) des positions (C1, C2) des deux centres optiques ;
b) des angles définissant les orientations des axes optiques;
c) des coordonnées d'un point de l'objet.
On finira bientôt par tout savoir ...
Et comment cette réalisation a-t-elle été obtenue ? Par un programme fait main, ou à l'aide d'un logiciel ? Et obtiens-tu des résultats satisfaisants ?
Il faut d'abord travailler sur les projections verticales des points de l'objet sur un plan horizontal. Le reste viendra facilement.
Il s'agit de l'équation cartésienne d'une droite, c'est à dire de la relation intervenant entre les coordonnées (x, y) d'un point quelconque de la droite considérée; les constantes (a, b) caractérisent cette droite.
PS: voir anapurna.
On est revenu au point de départ.
Il y a 2 vecteurs en 3d pour le coin supérieur gauche et 2 vecteurs en 3d pour le coin inférieur droit. On peut donc prendre la solution que j'évoquais dans le message #6.
La notion un peu ardue est sûrement le produit vectoriel. Mais Wikipedia, à la page "Produit Vectoriel", au paragraphe "Calcul en composantes", donne la solution.
Astuce : Si le vecteur directeur estalors l'équation du plan est ax+by+cz+d=0. Il n'y a plus que "d" à trouver. Mais il suffit de remplacer x y z par les coordonnées d'un point du plan pour trouver l'équation complète du plan.
Il y a un peu de boulot mais le chemin est tout tracé.
Cette réponse vous apporte quelque chose ? Cliquez sur


Il faut créer un troisième segment formé par un point P de la droite AB et un point Q de la droite CD En faisant un balayage jusqu'a trouver PQ de longueur minimum.
On peut guider le balayage en indiquant que le segment PQ doit être perpendiculaire aux segment AB et CD. Le point chercher est (produit scalaire nul) le milieu de PQmin
Code C# : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58

Vous avez un bloqueur de publicités installé.
Le Club Developpez.com n'affiche que des publicités IT, discrètes et non intrusives.
Afin que nous puissions continuer à vous fournir gratuitement du contenu de qualité, merci de nous soutenir en désactivant votre bloqueur de publicités sur Developpez.com.
 Répondre avec citation
Répondre avec citation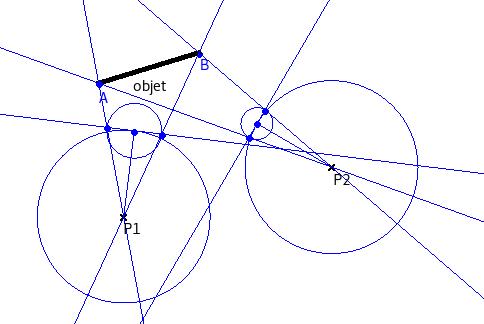


Partager