










Voilà à quoi ressemble le cerveau de mon robot. Un fouillis de câbles. Et il y en a autant en dessous.
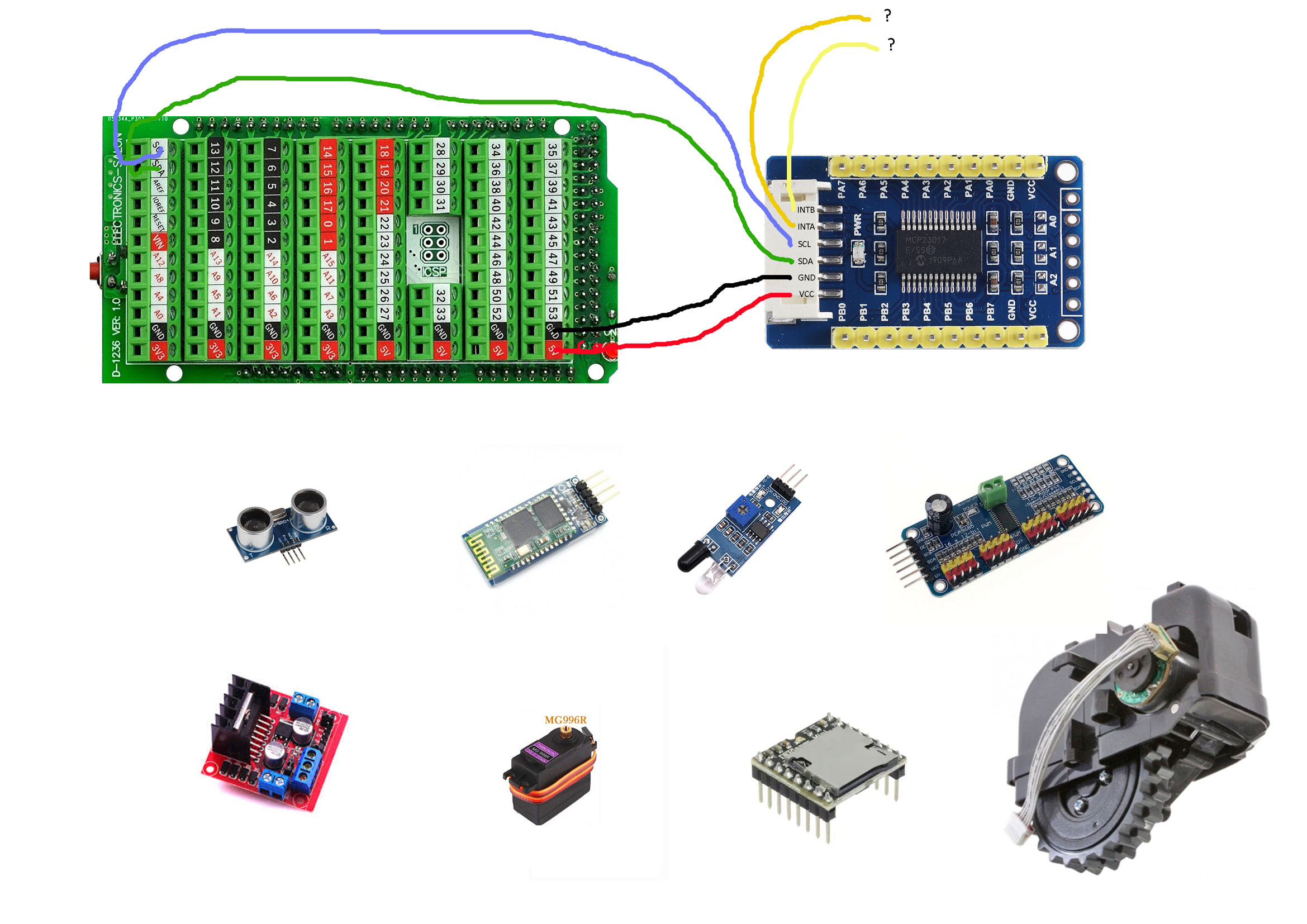
Au départ j'ai connecté directement sur la MEGA. Je me suis très vite aperçu que les broches avaient tendance à ne pas tenir les nombreuses manipulations effectuées. J'ai donc opté pour un module avec bornes (comme l'image le montre sur mon pc) Très bien au départ, mais la multitude de câbles donne ce fouillis inextricable et difficile d'accès à terme. A chaque ajout j'ai des soucis de pannes sur un autre élément.
J'ai recherché sur le web une plus grande plaque avec des petite bornes similaire à mon module. Je n'ai rien trouvé, et les bornes électriques sont trop grosse.
Et surtout je souhaite éviter les soudures.
QUESTION : Auriez-vous une idée ?
Merci

 Répondre avec citation
Répondre avec citation










Partager