









Bonjour à tous
Je me lance dans un projet perso avec un Attiny 5 et j'ai des difficultés pour détecter l'appui d'un bouton relié à une entrée. Je suis électronicien de base pas programmeur.
Voici le code
Code C : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
le datasheet https://ww1.microchip.com/downloads/...S40002060A.pdf
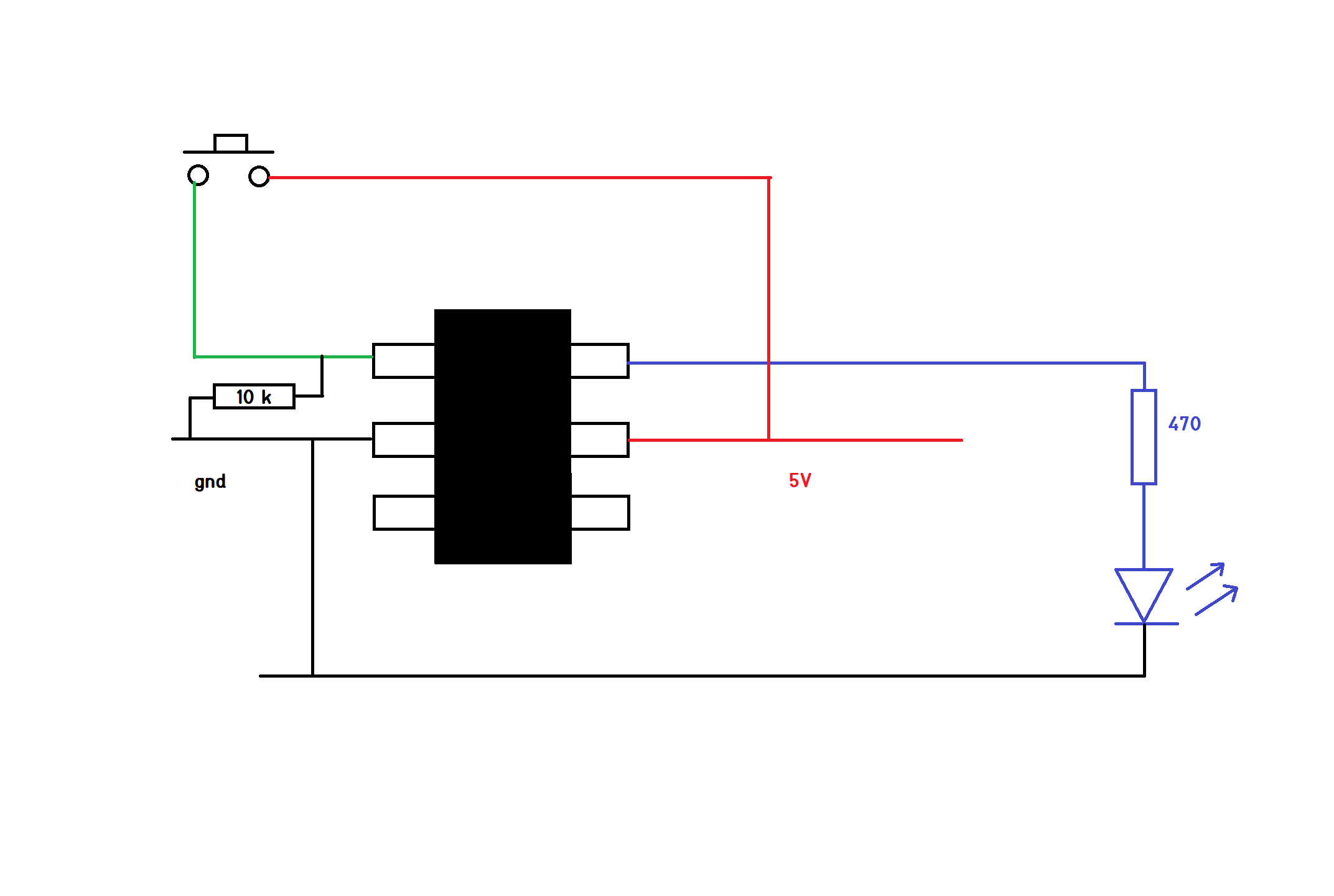
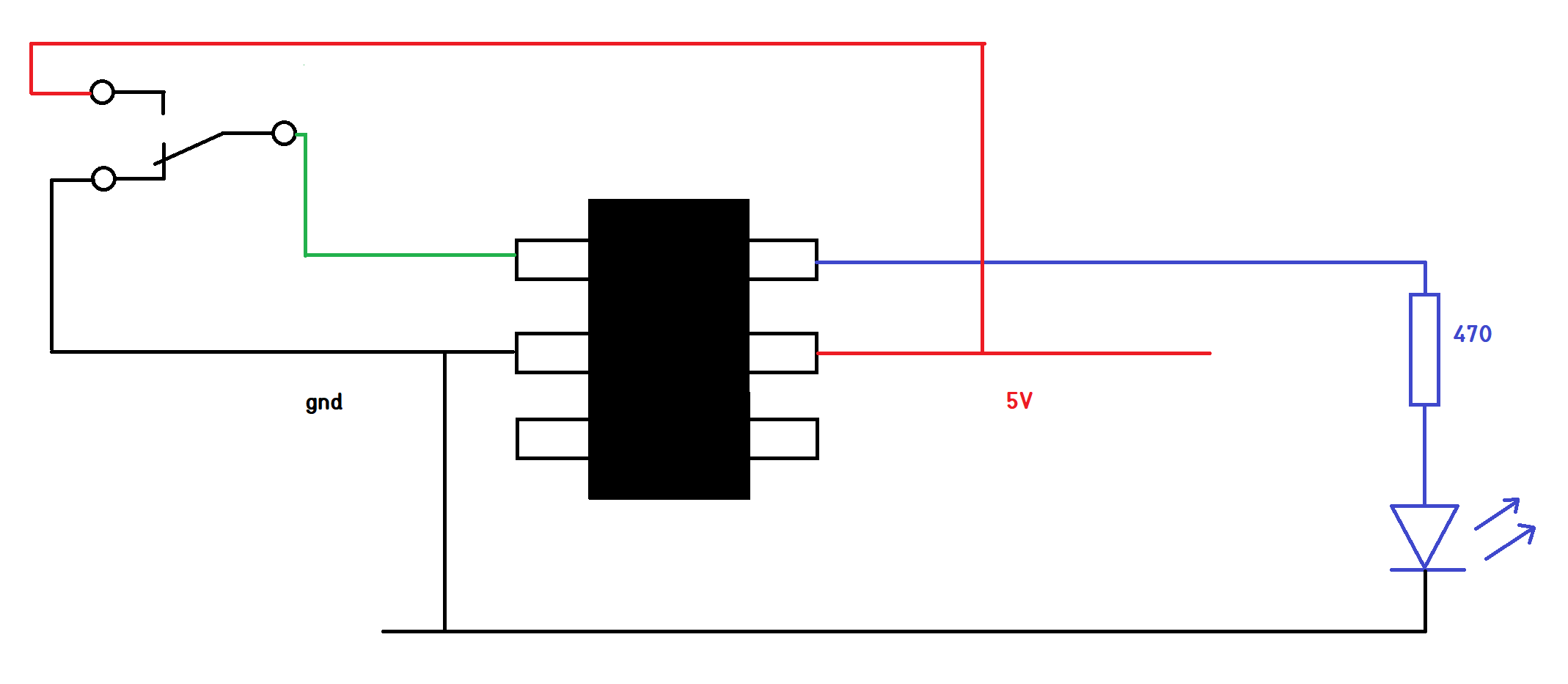
Je vous joint le schéma
Ma difficulté et sur le test de l'entrée PB0 je ne suis pas sur que ce soit bon car le code tel qu'il est ecrit tourne en boucle en faisant clignoter la led alors que je voudrait simplement l'éteindre 200 millisecondes à chaque appui sur le bouton .
Si vous avez des pistes soit coté hard ou coté soft je suis preneur
 Répondre avec citation
Répondre avec citation






Partager