1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
| // Library Required on top of the Arduino environment. Those Library are the property of their respective owners
// SimpleBouton Library : http://forum.arduino.cc/index.php?topic=375232.0
// TinyGPS++ library : https://github.com/mikalhart/TinyGPSPlus
/*
--------------------------------------------------------------
KEEP THIS INFORMATION IF YOU USE THIS CODE
Copyright (c) 2021 Jay For the Developpez.com forum
https://www.developpez.net/forums/d2100922/general-developpement/programmation-systeme/embarque/arduino/projet-arduino-gps-neo-7m/
Licenses for libraires included in this program apply
This program is free software; you can redistribute it and/or
modify it under the terms of the GNU Lesser General Public
License as published by the Free Software Foundation; either
version 2.1 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public
License along with this library; if not, write to the Free Software
Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
--------------------------------------------------------------
*/
// ======== CONFIGURATION DU HARDWARE ============
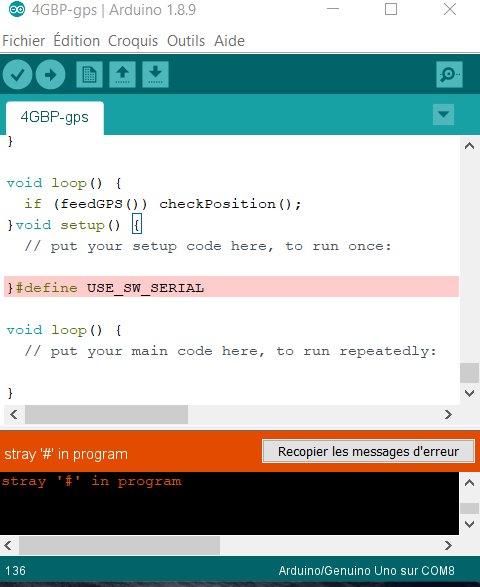
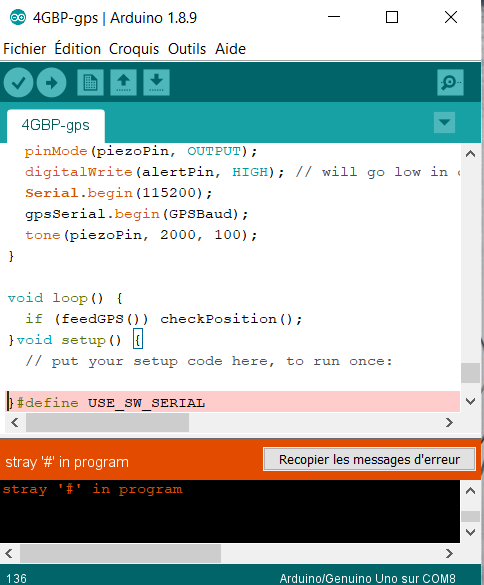
// if you use an Arduino with only one Serial port, uncomment this line
#define USE_SW_SERIAL
#ifdef USE_SW_SERIAL
#include <SoftwareSerial.h>
const uint8_t RXPin = 2; // the arduino pin on which to receive serial data from your GPS
const uint8_t TXPin = 3; // the arduino pin on which to transmit serial data to your GPS
SoftwareSerial gpsSerial(RXPin, TXPin);
#else
#define gpsSerial Serial1 // otherwise define here which Hardware Serial Port to use
#endif
// define your GPS baud rate (9600 is the default for GPS Neo 7M)
const uint32_t GPSBaud = 9600;
// the pins to set the alert distance 20 + 6 x bitMask (bitMask from LSB to MSB).
// eg if dip config is 1001 that's 9 in decimal, distance will be 20 + 9x6 = 74m.
// min distance = 20m, max distance with bitMaks @1111 = 100m
const uint8_t dipSwitchPins[] = {4, 5, 6, 7};
const uint8_t nbDipSwitches = sizeof dipSwitchPins / sizeof dipSwitchPins[0];
// button to record position, wired as : pin---BP---GND
const uint8_t recordPositionPin = 8;
// the pin triggering the alert. HIGH by default, turns LOW when distance is above threshold
const uint8_t alertPin = 9;
// the pin for the sound (a simple piezo) pin --- (piezo +) [piezo] (piezo -) ---- GND
const uint8_t piezoPin = 10;
// --------------------------------------------------------------
#include <simpleBouton.h>
simpleBouton boutonPosition(recordPositionPin);
#include <TinyGPS++.h>
TinyGPSPlus gps;
double recordedLatitude;
double recordedLongitude;
bool recordedPosition = false;
double HaversineDistance(const double lat1, const double long1, const double lat2, const double long2)
{
double latRad1 = radians(lat1);
double latRad2 = radians(lat2);
double lonRad1 = radians(long1);
double lonRad2 = radians(long2);
double half_diffLa = (latRad2 - latRad1) / 2.0;
double s_half_diffLa = sin(half_diffLa);
double half_doffLo = (lonRad2 - lonRad1) / 2.0;
double s_half_doffLo = sin(half_doffLo);
double computation = asin(sqrt(s_half_diffLa * s_half_diffLa + cos(latRad1) * cos(latRad2) * s_half_doffLo * s_half_doffLo));
return 2.0 * 6372795.0 * computation;
}
bool feedGPS()
{
bool gotFix = false;
while (gpsSerial.available() > 0)
if (gps.encode(gpsSerial.read())) {
gotFix = true;
break;
}
return gotFix;
}
uint32_t maxDistance()
{
uint8_t dipSwitchByte = 0;
for (uint8_t i = 0; i < nbDipSwitches; i++)
if (digitalRead(dipSwitchPins[i]) == LOW) bitSet(dipSwitchByte, i);
return 20ul + 6 * dipSwitchByte; // dipSwitchByte between 0 and 15 => distance between 20+0=20 and 20+6*15=100
}
void checkUserAction()
{
static bool recordingAttempt = false;
uint32_t duree = boutonPosition.dureeEnfonce();
boutonPosition.actualiser();
if (boutonPosition.vientDEtreEnfonce()) recordingAttempt = true;
if (recordingAttempt && (boutonPosition.vientDEtreRelache() || (duree > 2000))) {
if (gps.location.isValid()) {
recordedLatitude = gps.location.lat();
recordedLongitude = gps.location.lng();
recordedPosition = true;
recordingAttempt = false;
Serial.print(F("Recorded Position = "));
Serial.print(recordedLatitude, 6); Serial.write(','); Serial.println(recordedLongitude, 6);
tone(piezoPin, 1000, 200);
} else {
Serial.println(F("Can't record position, no valid fix"));
}
}
}
void checkPosition()
{
static bool alert = false;
if (gps.location.isValid()) {
Serial.print(F("Position: ")); Serial.print(gps.location.lat());
Serial.write(','); Serial.println(gps.location.lng());
if (recordedPosition) {
double distance = HaversineDistance(gps.location.lat(), gps.location.lng(), recordedLatitude, recordedLongitude);
Serial.print(F("Distance from position: ")); Serial.print(distance); Serial.println(F(" m"));
if (distance >= maxDistance()) {
if (!alert) {
digitalWrite(alertPin, LOW);
alert = true;
tone(piezoPin, 600, 100);
delay(120);
tone(piezoPin, 300, 100);
Serial.print(F("alert distance = ")); Serial.println(distance);
}
} else {
if (alert) {
digitalWrite(alertPin, HIGH);
tone(piezoPin, 300, 100);
delay(120);
tone(piezoPin, 600, 100);
Serial.print(F("Distance back in range : ")); Serial.println(distance);
}
alert = false;
}
}
}
}
void setup() {
for (auto& p : dipSwitchPins) pinMode(p, INPUT_PULLUP);
pinMode(alertPin, OUTPUT);
pinMode(piezoPin, OUTPUT);
digitalWrite(alertPin, HIGH); // will go low in case of Alert
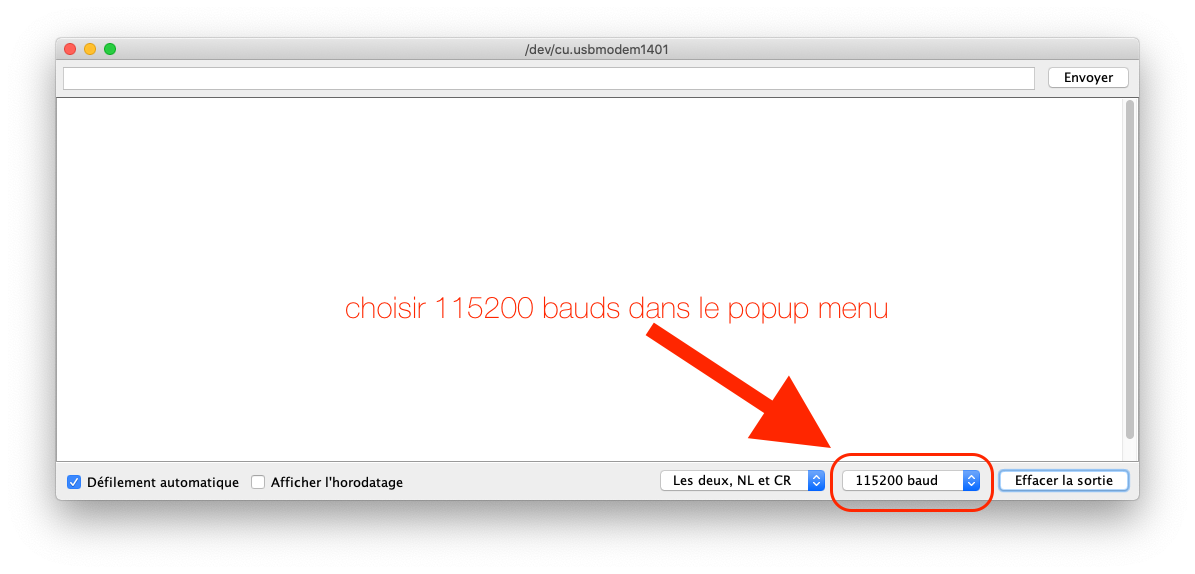
Serial.begin(115200);
gpsSerial.begin(GPSBaud);
}
void loop() {
checkUserAction();
if (feedGPS()) checkPosition();
} |












 Répondre avec citation
Répondre avec citation










Partager