


Bonsoir Jacques Chabrol!
C'est de 7 à 12V.
Bonne nuit, moi c'est mes neurones que je vais faire dormir
jpbbricole
Inscrivez-vous gratuitement
pour pouvoir participer, suivre les réponses en temps réel, voter pour les messages, poser vos propres questions et recevoir la newsletter









Bonsoir Jacques Chabrol!
C'est de 7 à 12V.
Bonne nuit, moi c'est mes neurones que je vais faire dormir
jpbbricole
L'expérience est la seule chose qu'il ne faut acheter que d'occasion!



Merci pour la vidéo Jacques - ( on aurait aimé voir le circuit aussi ! je sais j'abuse)


Bonjour,
Mais comment vous avez fait pour passer du sujet initial à ça :
Envoyé par Jsiorat





Salut Jay,
ça viendra ! patience !
Être vieux, c'est être jeune depuis plus longtemps que les autres !
Bonjour Katlyn,
comment j'ai fait tout ça ? en me procurant les kits d'apprentissage de chez Arduino, Elegoo etc... et puis, ... l'envie d'apprendre à gérer mon train miniature !
et là, tout le monde ici, m'a été d'un grand et énorme secours !
Par contre, je cherche des exemples pour écran LCD 3,5p de chez Kuman pour Arduino ; comment placer des traits précisément, créer des boutons cliquables, déssiner des figures géométriques à des points x,y bien précis etc ...
difficile de trouver ce genre de turoriels sur internet (la pub pour acheter, y en a plus qu'il n'en faut ! mais des exemples ... ???)
A+, cordialement
Jacques
Être vieux, c'est être jeune depuis plus longtemps que les autres !
En fait, je ne m'expliquais pas comment vous en êtes venus à faire tous ces achats pour ce projet, car je trouve que cest un très mauvais investissement, du gaspillage. Tant qu'à dépenser, au temps que ça ressorte.
ça mérite un nouveau fil de discussion sans doute. Quel écran exactement avez vous ? (un lien ?)Par contre, je cherche des exemples pour écran LCD 3,5p de chez Kuman pour Arduino ; comment placer des traits précisément, créer des boutons cliquables, déssiner des figures géométriques à des points x,y bien précis etc ...
difficile de trouver ce genre de turoriels sur internet (la pub pour acheter, y en a plus qu'il n'en faut ! mais des exemples ... ???)
je pense que vous aurez besoin de la bibliothèque UTFT et si vous voulez gérer le 'touch' (écran résistif) prenez la bibliothèque URTouch
si c'est un écran contrôlé par ili9481 ili9468, ili9488 hx8357 ou r61581 il faut la bibliothèque mcufriend_kbv
Bonsoir Jay,
J'ai un écran Kuman 3.5k LCD !
Être vieux, c'est être jeune depuis plus longtemps que les autres !
bonsoir Jacques,
un lien aiderait à savoir quel modèle c'est
serait-ce celui là ?
bonjour Jay,
Oui, pardon j'aurai dû ! la fatigue, l'âge peut-être !
Oui c'est bien ça !
Être vieux, c'est être jeune depuis plus longtemps que les autres !
Salut
Il faut installer (directement depuis lIDE) la bibliothèque mcufriend_kbv et vous verrez à lusage des exemples quil faut La bibliothèques dAdafruit : Adafruit_GFX (MCUFRIEND_kbv hérite de toutes les méthodes de la classe Adafruit_GFX) et si votre écran est un écran resistif permettant donc la détection dun appui il vous faudra aussi installer La bibliothèque Adafruit Touch-Screen
Enfichez votre écran sur votre arduino dans le bons sens et branchez en usb sur lordinateur.
Une fois ces 3 bibliothèques installées, vous allez dans les exemples de mcufriend et executez diagnose_Touchpins.ino. Ouvrez la console série à 9600 bauds. Rien ne se passera sur lécran mais la console devrait afficher les numéros des 4 pins (X-, X+, Y- et Y+) correspondant au digitizer de lécran resistif.
Ensuite il faut déterminer les valeurs min et Max du pont de résistances de votre écran pour calibration.
Ouvrez lexemple TouchScreen_Calibr_native.ino. Vérifiez que les pins définies ligne 30correspondent aux X Plus (XP) X Moins (XM) et idem en Y obtenus à létape précédente. Si ce nest pas le cas, changez les Nº de pins. Chargez et exécutez le script qui vous donnera aussi dans la console des valeurs pour votre écran.
Code : Sélectionner tout - Visualiser dans une fenêtre à part int XP = 7, YP = A2, XM = A1, YM = 6; //next common configuration
Il faut noter ces pins et valeurs et quand vous ouvrez des exemples il faudra modifier le code pour les adapter à votre écran, vous verrez en début des exemples du code comme cela:
Cest ce quil faut pour votre écran bien sûr quil faudra mettre.
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
Ensuite vous navez plus quà tester les exemples, ça devrait marcher...
Jay ... une question ! (désolé pour l'humour ... Jay <==> j'ai !)
on peut lire dans certain fichier .ino, la forme suivante :
#if 1
void setup
void loop
#endif
Utilité de #if / #endif qui englobe tout le code ?
Merci, a+
Jacques
Être vieux, c'est être jeune depuis plus longtemps que les autres !
Salut
ça permet de virer tout le code à la compilation en modifiant le 1 en 0 dans le #if 1.. bizarre.. vous avez un lien sur un truc en ligne où ils font cela.. si c'est tout le contenu du fichier, autant ne pas coder
Voila l'exemple :
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
Être vieux, c'est être jeune depuis plus longtemps que les autres !
Bonsoir Jacques
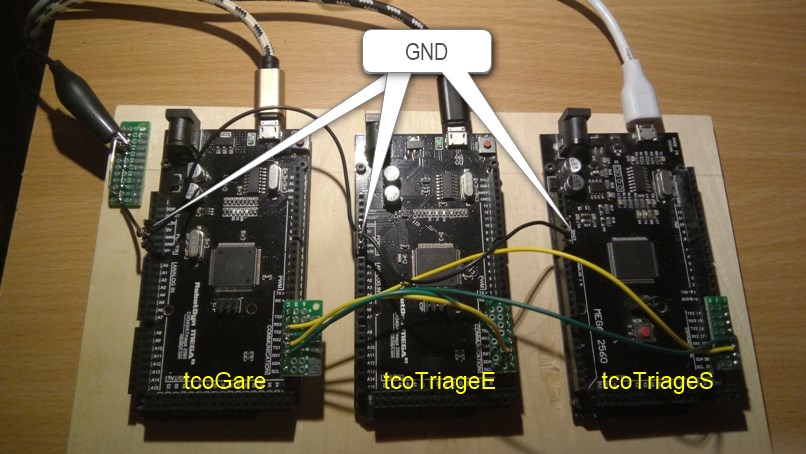
Voilà la première mouture de la gestion multi TCO. Comme dit précédemment, dans cette version, seul le tcoGare (index 0) peut communiquer avec les autres TCO.
Dans les 3 tco, tcoGare, tcoTriageE et tcoTriageS, on peut envoyer des ordres locaux par leur console respective.
Seul tcoGare lit, dans les tableaux bp et aig le champs tcoPseudo afin de voire s'il faut executer la commande localement ou la router vers le bon TCO.
La fonction des boutons LED et autres n'ont pas changé, chaque TCO peut être uitilisé indépendemment des autres.
Les TCO secondaires (slaves) communiquent, vers le TCO primaire (master) via le port Serial1 (Tx1 18, Rx1 19)
La câblage est ainsi:
tcoGare Serial1 Tx1 18 vers tcoTriageE Rx1 19
tcoGare Serial1 Rx1 19 vers tcoTriageE Tx1 18
tcoGare Serial2 Tx2 16 vers tcoTriageS Rx2 19
tcoGare Serial2 Rx2 17 vers tcoTriageS Tx2 18
Les GND des 3 TCO doîvent être reliés ensembles.
Marche à suivre pour paramétrer l'execution des ordres vers d'autres TCO depuis tcoGare, exemple avec tcoTriageE et fichier Train_Tabl_tcoTriageE_BP.h.
Pour exécuter cette ligne depuis tcoGare:
Attention à respecter le nombre d'aigCmdx qui est propre au fichier *_BP.h
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
la ligne du tcoTriageE a 8 aigCmdx, mais la ligne ajoutée dans tcoGare n'en a que 5 (#define bpMotNombreMax)
Exemple d'ajout dans Train_Tabl_tcoGare_BP.h pour envoyer des ordres dane tcoTriageEntree (TRIEN) et tcoTriageS (TRISO)
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
Concernant les fichiers de configuration *_BP.h, le nombre de aigCmdx doit être renseigné à la définition #define bpMotNombreMax de chaque TCO (en tête du programme).
Tout les BP d'un fichier doivent avoir le même nombre d'aigCmdx.
Le programme:et des exemples de tableaux AIG et BP du tcoGare:
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
360
361
362
363
364
365
366
367
368
369
370
371
372
373
374
375
376
377
378
379
380
381
382
383
384
385
386
387
388
389
390
391
392
393
394
395
396
397
398
399
400
401
402
403
404
405
406
407
408
409
410
411
412
413
414
415
416
417
418
419
420
421
422
423
424
425
426
427
428
429
430
431
432
433
434
435
436
437
438
439
440
441
442
443
444
445
446
447
448
449
450
451
452
453
454
455
456
457
458
459
460
461
462
463
464
465
466
467
468
469
470
471
472
473
474
475
476
477
478
479
480
481
482
483
484
485
486
487
488
489
490
491
492
493
494
495
496
497
498
499
500
501
502
503
504
505
506
507
508
509
510
511
512
513
514
515
516
517
518
519
520
521
522
523
524
525
526
527
528
529
530
531
532
533
534
535
536
537
538
539
540
541
542
543
544
545
546
547
548
549
550
551
552
553
554
555
556
557
558
559
560
561
562
563
564
565
566
567
568
569
570
571
572
573
574
575
576
577
578
579
580
581
582
583
584
585
586
587
588
589
590
591
592
593
594
595
596
597
598
599
600
601
602
603
604
605
606
607
608
609
610
611
612
613
614
615
616
617
618
619
620
621
622
623
624
625
626
627
628
629
630
631
632
633
634
635
636
637
638
639
640
641
642
643
644
645
646
647
648
649
650
651
652
653
654
655
656
657
658
659
660
661
662
663
664
665
666
667
668
669
670
671
672
673
674
675
676
677
678
679
680
681
682
683
684
685
686
687
688
689
690
691
692
693
694
695
696
697
698
699
700
701
702
703
704
705
706
707
708
709
710
711
712
713
714
715
716
717
718
719
720
721
722
723
724
725
726
727
728
729
730
731
732
733
734
735
736
737
738
739
740
741
742
743
Train_Tabl_tcoGare_BP.h
et Train_Tabl_tcoGare_AIG.h
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
Pour programmer chaque TCO, lire l'explication, au début du programme, sous:
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
//===================================== Selection du TCO pour sa programmation
Je te donne tout ça à "digérer", il faut que je fasse une pause de 2 ou 3 jours afin de terminer un autre programme.
Au retour je testerai un ou 2 façon de commander les moteurs d'aiguilles.
Je te mets, en PJ, un ZIP avec tout les fichiers, j'ai mis les tiens aux nouveaux "standards" du programme.
A+, bonne soirée et bon week-end
Cordialement
jpbbricole
L'expérience est la seule chose qu'il ne faut acheter que d'occasion!
Ah ça vient de cet exemple je suppose
Si vous regardez il y a deux fichiers .ino dans ce répertoire et lauteur suggère deux approches. Comme on ne peut pas avoir deux setup et deux loop il propose de commenter un des deux code, comme indiqué au début du code
Code : Sélectionner tout - Visualiser dans une fenêtre à part an alternative approach. swap the #if 1 / 0 values to try it
Merci Jay,
je commence à comprendre certaines subtilités de code !
Il faut être intelligent (ce qui n'est pas mon cas !) pour programmer ce type de codage.
Bon WE, JP m'a donné du travail pour aujourd'hui et très certainement pour demain aussi
Cordialement, Jacques
Être vieux, c'est être jeune depuis plus longtemps que les autres !
Salut JP,
si j'ai bien compris, LE code est à implanter sur chaque carte en tenant compte de "Selection des parametres propre au TCO" ...
Je vais donc procéder au câblage complet des breakboard boutons et LEDs de TCO pendant le WE.
Bon WE, A+, Jacques
Être vieux, c'est être jeune depuis plus longtemps que les autres !
Salut Jacques
Oui, l'essentiel se passe ici:
C'est seulement si ti changes le nombre le nombre de aigCmdn dans un fichier *_BP.h qu'il faut réajuster ici:
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
11
12
A+
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
Cordialement
jpbbricole
L'expérience est la seule chose qu'il ne faut acheter que d'occasion!
@JP
Salut
beau boulot pour le multi TCO.
Quelques suggestions constructives si je peux me permettre:
vous avez unligne 71 du code, je ne pense pas que ce soit nécessaire.
Code : Sélectionner tout - Visualiser dans une fenêtre à part #define Serial1
vous pourriez conserver dans la struct tcoDefinition le port série associé à un TCO et créer dans le code en dur le tableau de tous les TCOs.la définition relative à un TCO devient alors simplement la définition du tcoLocalIndex
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17struct tcoDefinition { int localIndex; // n'est plus vraiment nécessaire, ce sera l'index dans le tableau const char* nom; const char* pseudo; byte roleInNet; Stream* portSerie; // Stream permet de mettre un HardwareSerial ou SoftwareSerial }; // définition de nos TCO tcoDefinition TCO[] = { {0, "Gare", "GARE", tcoRoleMaster, &Serial}, {1, "Triage Entree", "GARE", tcoRoleMaster, &Serial1}, {2, "Triage Sortie", "TRIEN", tcoRoleSlave, &Serial2}, //{3, "futur", "FUTUR", tcoRoleSlave, &Serial3}, // pas utilisé pour le moment }; const byte tcoNombre = sizeof TCO / sizeof TCO[0];Je suggère aussi de mettre bpMotNombreMax dans l'include plutôt que le corps du programme principal.
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
11
12
Comme ça tous les TCO se connaissent entre eux (en prévision d'une discussion bidirectionnelle future TCO <--> TCO) et au lieu de calculer dynamiquement avec des String quel est le tcoLocal ou tcoDistant, vous n'avez plus qu'à extraire un indice dans ce tableau pour avoir accès aux informations relatives à ce TCOPour envoyer une communication directement au tcoDistant on connait son port Série en regardant dans la structure et donc on peut faire
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
Code : Sélectionner tout - Visualiser dans une fenêtre à part TCO[tcoDistant].portSerie->println(tcoCommand);
of course, ce n'est qu'une suggestion.

Vous avez un bloqueur de publicités installé.
Le Club Developpez.com n'affiche que des publicités IT, discrètes et non intrusives.
Afin que nous puissions continuer à vous fournir gratuitement du contenu de qualité, merci de nous soutenir en désactivant votre bloqueur de publicités sur Developpez.com.
 Répondre avec citation
Répondre avec citation
Partager