1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
| CONST Npas = 360;
TYPE LstR = ARRAY[-Npas..Npas] OF Reel;
VAR Liste: LstR;
PROCEDURE Aff_Min(J1, J2: Z_32);
CONST C1 = 4; C2 = C1 + 26; C3 = C1 + 32; C4 = C1 + 43;
L1 = 54; v = 3; w = 803;
VAR Kt, T1, T2: Reel;
BEGIN
Kt:= 90 / Npas; T1:= Kt * J1; T2:= Kt * J2;
E(0015); Wt(C1, L1, 'Inclinaison des droites:');
Wt(C2, L1 - 1, 'J1 = T1 = ');
Wt(C2, L1 + 1, 'J2 = T2 = ');
E(0012); We(C3, L1 - 1, J1, v); We(C3, L1 + 1, J2, v);
E(0010); Wr(C4, L1 - 1, T1, w); Wr(C4, L1 + 1, T2, w)
END;
PROCEDURE Trace_Minima(Ha, Xm: Z_32; Lim: Reel; Li: LstR;
VAR J_1, J_2: Z_32; VAR Ma2: Tab_Pix);
CONST P100: Pixel = (255, 0, 0);
VAR j, J1, J2: Z_32; s, Sa, Sb: Reel;
BEGIN
J1:= 2 * Npas; J2:= 2 * Npas;
FOR j:= (1 - Npas) TO (Npas - 1) DO
BEGIN
s:= Li[j];
IF (s<Lim) THEN BEGIN
Sa:= Li[j - 1]; Sb:= Li[j + 1];
IF ((Sa>s) AND (s<Sb)) THEN
IF (J1>Npas) THEN J1:= j
ELSE J2:= j
END
END;
FOR j:= 0 TO (Ha DIV 2) DO BEGIN
Ma2[Xm + J1, j]:= P100;
Ma2[Xm + J2, j]:= P100
END;
J_1:= J1; J_2:= J2
END;
PROCEDURE Fond_Graphique(La, Ha, X_1, X_2, X_m, Y_1, Y_2: Z_32;
VAR Ma2: Tab_Pix);
CONST m = 255;
P000: Pixel = (0, 0, 0);
P010: Pixel = (0, m, 0);
P101: Pixel = (180, 000, 180);
P111: Pixel = (m, m, m);
VAR x, y: Z_32; TestX, TestY: Bool; Px: Pixel;
BEGIN
FOR x:= 0 TO (La - 1) DO
FOR y:= 0 TO (Ha - 1) DO
BEGIN
TestX:= ((x<X_1) OR (x>X_2));
TestY:= ((y<Y_1) OR (y>Y_2));
IF (TestX OR TestY) THEN Px:= P101 ELSE Px:= P000;
Ma2[x, y]:= Px
END;
FOR y:= 0 TO (Ha - 1) DO BEGIN
Ma2[X_1, y]:= P111; Ma2[X_2, y]:= P111;
Ma2[X_m, y]:= P111
END;
END;
PROCEDURE Calc_Mat_Im2(La, Ha: Z_32; Li: LstR; VAR Ma2: Tab_Pix);
CONST P010: Pixel = (0, 255, 0);
VAR h, Hmax, i, I1, I2, x, X1, X2, Xmed, y, Y1, Y2: Z_32;
Ds, Kh, s, Slim, Smax, Smin: Reel; Px: Pixel;
BEGIN
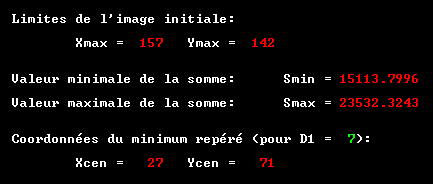
Smax:= 0; Smin:= Li[1];
FOR i:= -Npas TO Npas DO
BEGIN
s:= Li[i]; IF (Smax<s) THEN Smax:= s;
IF (Smin>s) THEN Smin:= s
END;
Xmed:= La DIV 2; X1:= Xmed - Npas; X2:= Xmed + Npas;
Hmax:= Round(0.9 * Ha); Y1:= Round(0.05 * Ha); Y2:= Y1 + Hmax;
Kh:= Hmax / (Smax - Smin);
Fond_Graphique(Larg_Image, Haut_Image, X1, X2, Xmed, Y1, Y2, Matrice_2);
FOR i:= -Npas TO Npas DO
BEGIN
Ds:= Li[i] - Smin; h:= Round(Kh * Ds); x:= Xmed + i;
FOR y:= Y1 TO (Y1 + h) DO Ma2[x, y]:= P010
END;
Slim:= Som_2R(0.8 * Smin, 0.2 * Smax);
Trace_Minima(Haut_Image, Xmed, Slim, Liste,
Jmin_1, Jmin_2, Matrice_2);
Aff_Min(Jmin_1, Jmin_2)
END;
FUNCTION CoefVarR(Dx, Dy, R2: Reel): Reel;
VAR Dx2, Dy2, s, v, w: Reel; // C = (1 - dý/Dý)^4
BEGIN
Dx2:= Sqr(Dx); Dy2:= Sqr(Dy); s:= Dx2 + Dy2;
IF (s>R2) THEN w:= 0
ELSE BEGIN
v:= s / R2; w:= Sqr(1 - v)
END;
Result:= Sqr(w)
END;
PROCEDURE Calc_Liste(Ym, Yc: Z_32;
VAR L_: LstR; VAR Ma0: Tab_Pix);
CONST Jmax = 200;
VAR i, j, Rmax, SIc, u, v, X1, X2, Y1, Y2, Zm: Z_32;
Ct, Dr, g, r, s, St, t, x, y: Reel; Px: Pixel;
BEGIN
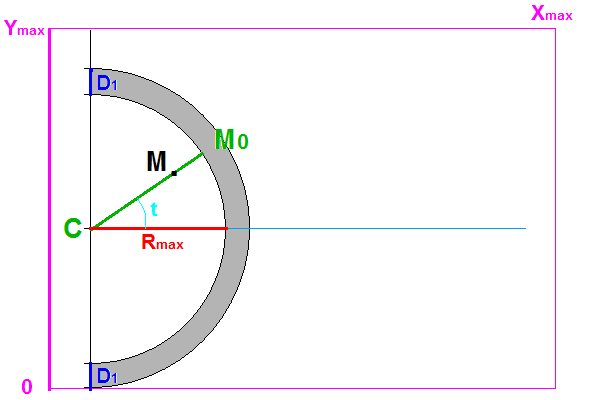
IF ((2 * Yc)<Ym) THEN Rmax:= Yc ELSE Rmax:= Ym - Yc;
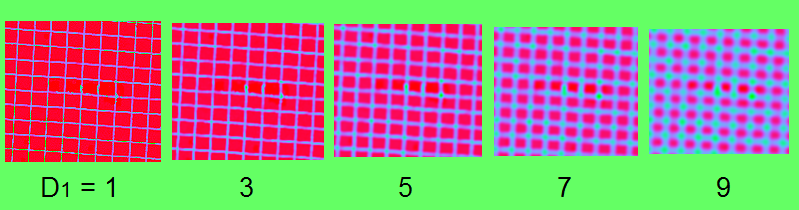
Dec(Rmax, D1); Dr:= Rmax / Jmax;
FOR i:= -Npas TO Npas DO
BEGIN
r:= i / Npas; t:= H_Pi * r;
SinCos(t, St, Ct); s:= 0;
FOR j:= 1 TO Jmax DO
BEGIN
r:= Dr * j;
x:= Som_2R(Xcen, r * Ct); y:= Som_2R(Ycen, r * St);
Zm:= Trunc(x); X1:= Zm - D1; X2:= Zm + (D1 + 1);
Zm:= Trunc(y); Y1:= Zm - D1; Y2:= Zm + (D1 + 1);
FOR u:= X1 TO X2 DO
FOR v:= Y1 TO Y2 DO BEGIN
Px:= Ma0[u, v]; SIc:= Px[1];
Inc(SIc, Px[2]); Inc(SIc, Px[3]);
g:= CoefVarR(u - x, v - y, D2);
IncR(s, g * SIc)
END
END;
Liste[i]:= s
END
END; |









 Répondre avec citation
Répondre avec citation


![Nom : Grille [2019-078-30]_600x543.png
Affichages : 1273
Taille : 320,5 Ko](https://www.developpez.net/forums/attachments/p494641d1564506027/general-developpement/algorithme-mathematiques/traitement-d-images/trouver-l-angle-d-quadrillage/grille-2019-078-30-_600x543.png/)

![Nom : Grille [2019-08_01] 600x543_.png
Affichages : 1191
Taille : 398,2 Ko](https://www.developpez.net/forums/attachments/p495142d1564748988/general-developpement/algorithme-mathematiques/traitement-d-images/trouver-l-angle-d-quadrillage/grille-2019-08_01-600x543_.png/)









Partager