


Bonjour seb201
Alors, pour plus de rapidité un servo 30 KG 90-180° avec un long bras qui déplace directement le contre-poids?Envoyé par seb201

A+
Cordialement
jpbbricole
Inscrivez-vous gratuitement
pour pouvoir participer, suivre les réponses en temps réel, voter pour les messages, poser vos propres questions et recevoir la newsletter









Bonjour seb201
Alors, pour plus de rapidité un servo 30 KG 90-180° avec un long bras qui déplace directement le contre-poids?
A+
Cordialement
jpbbricole
L'expérience est la seule chose qu'il ne faut acheter que d'occasion!


ça n'ira pas la distance a parcourir est trop importante ,le moteur reste la meilleur solution. Voila ce que ça donne en directe:
Le seul problème c'est que le L293d baisse le courant.
Bonsoir seb21
Peut-être que la puissance demandée par le moteur dépasse les capacités du chip L293 et qu'il faut passer au L298. Mesures le courant consommé par le moteur, quand il est alimenté directement par batterie.
Quelle est la tension de la batterie?
A+
Cordialement
jpbbricole
L'expérience est la seule chose qu'il ne faut acheter que d'occasion!
Le moteur n'a pas apprécié, j'en ai donc pris un autre moteur du coup; mais il monte à 2,6 sur le calibre 600mA. J'ai une question si je veux vraiment avoir du couple en restant sur un moteur le mieux serait un moteur pas à pas non ?? Et le meilleur contrôleur que je puisse avoir est un l298d en terme de courant maximum??
Et deuxième question un moteur pas à pas aura-t-il un meilleur couple qu'un moteur dc à même courant ou bien le moteur pas à pas consomme plus de courant et c'est pour cela qu'il a un meilleur couple ??
Est-ce que ceci correspondrait bien à ce que je veux : https://fr.aliexpress.com/item/32973...b-d0534847dbb6
Et quel moteur pas à pas pourrais-je utiliser pour avoir le meilleur couple possible tout en conservant une certaine vitesse et sans cramer le L298n ?


Si vous êtes prêt à changer de moteur et de contrôleur, il faut raisonner dans l'autre sens: Il faudrait comprendre le caractéristiques (glossaire ici) dont vous avez besoin pour votre application et en déduire quel moteur et donc quel contrôleur prendre - le(s) couple(s) est (sont) un des éléments importants mais vous devez aussi regarder quelle tension est dispo (12V), la puissance dispo (est-ce sur batterie, pouvez vous fournir 1A, 2A ?), etc
Vous pouvez voir les différents types de moteurs pas à pas ici par exemple avec un moyen de filtrer sur différents critères
Merci par toute ces infos. J'utilise une lipo de 11,1v de 5200mAh ,je sais que j'ai besoin d'un certain couple a cause des fortement poulie courroie et de mon chariot mais je ne sais pas comment savoir quels couple il me faut . Le meilleur contrôleur que je puisse avoir niveau Amperage maximum est celui que j'ai montrer ci dessus et il conviendra parfaitement étant donné la tention d'alimentation que j'utilise. Il ne me reste qu'a choisir le bon moteur mais je ne sais pas comment savoir le couple dont j'ai besoin tout en conservant une certaine vitesse de rotation.
Bonjour ser21
Si tu prends l'option moteur pas à pas(MPAP), il serait mieux d'opter pour un driver du genre TB6600 ou, plus petit A4988 et tu pourras le piloter avec la bibliothèque AccelStepper.
Ton accu serait suffisant, ce 2 drivers travaillent en courant, ce dernier se règle, pour le oremier par des switch et le second par in poterntiomètre.
Alors, là, pas lamoindre idée, j'ai plus tendance a y aller "au pif" avec le matériel que j'ai. Mais, si tu veux une réactivité comme sur ta dernière vidéo, il faudra un GROS MPAP!
Si tu donnes le poids, environ, à déplacer et la longueure du parcours, je peux toujours essayer.
Cordialement
jpbbricole
L'expérience est la seule chose qu'il ne faut acheter que d'occasion!
Le problème c'est qu'il ne me faut pas un moteur très lourd vue que je vais devoir faire contrepoids de l'autre coté ,mais je vais faire un teste demain avec l'autre moteur que j'ai. Au niveau du poids à déplacer il n'y a vraiment pas grand chose (un petit chariot fait maison) , le seul problème ce sont les frottements poulie courroie qui demande un peu de couple . Au niveau de la distance a parcourir de bout a bout je dirai qu'il y a +/- 50 cm.Et de plus je pense que l298n fera l'affaire et je peut utiliser la meme librairies que mon moteur Shield actuel il me semble, non?
Bonsoir seb21
Dans ce cas, au-lieu de disposer la courroie en carré, pourquoi pas en triangle avec le moteur d'entraînement au sommet du triangle, le poids du moteur serait, ainsi, au centre de gravité de l'ensemble, donc, son poids aura beaucoup moins d'importance.
Non, je ne crois pas, la bibliothèque AFMotor.h s'adresse au shield que tu utilises, avec l'interface L298, tu n'en aura plus besoin et tu utilisera la bibliothèque L298N.h qui est tout aussi simple à utiliser, il y a même le schéma de câblage dans l'exemple Simple.ino.
Si je trouve du temps, cette semaine, j'essaierai de faire ce montage.
A+
Cordialement
jpbbricole
L'expérience est la seule chose qu'il ne faut acheter que d'occasion!
euh ça fait quelques décennies que je n'ai pas regardé les trois lois de Newton et fait ce genre de calcul, mais je vais essayer de me souvenir, il y a peut-être des plus calés que moi sur ce thème qui viendront me contredire - c'est un peu sans filet là")
Vous avez un charriot que vous souhaitez mettre en mouvement en lui appliquant une force. il faudrait connaître l'accélération souhaitée.
Si une force est appliquée à un objet, celui ci accélère. le principe fondamental de la dynamique s'écrit F = m.a où m est la masse du solide et a l'accélération du solide.
Le couple nécessaire est la somme de deux couples résistants :
1-le couple de frottement, nécessaire pour vaincre les frottements à vitesse constante. Il faut pour cela connaître le coefficient de frottement équivalent des roues du charriot
2-Le couple d'accélération, nécessaire pour démarrer le chariot (vaincre la force fictive d'inertie). Il faut donc se fixer une valeur d'accélération arbitrairement : en combien de temps le chariot à l'arrêt atteindra t'il la vitesse de fonctionnement normal ?
En première approche, on peut ignorer la masse de la courroie et on peut considérer qu'une fois mise en mouvement la masse ne rencontre pas de frottements (elle se déplacera à vitesse constante et le moteur n'aura donc servi qu'à la mettre en mouvement). (la force du moteur ne servira ensuite qu'à contrer le frottement si vous êtes sur une surface plane).
--> On ne s'intéresse donc uniquement qu'au couple d'accélération, quitte a rajouter une petite marge d'erreur plus tard.
Pour connaître l'accélération souhaitée, on se souvient que la position à l'instant t d'un mobile soumis à une accélération constante est
pos(t) = 1/2.a.t2 + v0.t + pos0
si votre charriot était immobile au début, v0 vaut 0 et si vous étiez à une position origine, alors pos0 vaut aussi 0, donc la position dans le temps de votre masse par rapport à l'origine sera:
x(t) = 1/2.a.t2
Imaginez que vous vouliez que votre charriot parcourt D (en mètres) en un dixième de seconde (on dirait sur la vidéo), on aurait donc en remplaçant dans la formule
D = 1/2.a.(0,12) => D = 0,005a => a = D/0,005 m/s2
La force à appliquer sur votre charriot est de
F = accélération . Massecharriot = (D/0,05) . Massecharriot (en kg.m/s2 - c'est à dire en Newton)
Un couple est exprimé en N/m c'est le moment d'une force de 1 newton dont le bras de levier est de 1 mètre , soit 1 N m , ou encore 1 m2.kg/s2
Pour un moteur, le couple est définit par Couple = F . Rayon ou F est l'effort tangentiel et r la distance à l'axe de rotation (le rayon de la poulie)
Donc dans les conditions énoncées ci dessus Couple = (D/0,05) . Massecharriot . Rayon
sur votre film on dirait que vous avez des toutes petites poulies, disons que le rayon c'est 1cm (0.01m) et si la distance à parcourir de gauche à droite est de 50cm (0.5m), et disons que votre charriot avec sa masse pèse 500g (0,5kg)
donc dans la formule
Couple = (0,5/0,005) x 0,5 x 0.01 = 100 x 0.5 x 0.01 = 0.5 N.m
comme il y a toujours des frottements, on prendrait 10% à 15% en plus et donc vous cherchez un moteur de 0.5 à 0.6N.m.(mais bon 0.4 pourrait faire l'affaire aussi, y'aura un peu moins de peps). vous trouverez cela avec des moteurs de 300 à 400 grammes donc pas trop de poids à contrebalancer. (l'option de jpbricole est aussi tout à fait valide et une autre option serait de faire un montage ou le moteur est dans le chariot, donc son poids comptera dans la masse à déplacer)
-----------------------------
cela dit l'approche de Jpbricole qui est d'y aller au pif et prendre ce que l'on a sous la main et qui rentre dans le budget et de tester si ça convient, ça se tient aussi... Perso je commencerai par là avant d'acheter


Bonjour,
La démarche de Jay est, me semble t'il, bonne sur un terrain bien horizontal. Mais ce n'est pas le cas puisque le but du chariot est de rétablir cette horizontalité. Sans moteur le chariot bougerait, certes dans le sens inverse de ce que l'on cherche, mais il bougerait. Il faut donc réintroduire la pente dans les équations. S'il doit accepter des pentes jusqu'à 45°, le moteur devra, outre l'inertie et l'accélération à impulser, développer une force linéaire horizontale au moins égale au poids/1.414.
Souquez ferme.
Ever tried. Ever failed. No matter. Try Again. Fail again. Fail better. (Samuel Beckett)
Mon idée était que si le système fonctionne le Bateau ne bougera pas trop donc on devrait quasiment rester à plat
Mais si les conditions sont trop défavorables alors effectivement faudra compenser la composante horizontale du poids du charriot
La solution ne serait elle pas de prendre le cas le plus défavorable? En prenant la planche complètement à la verticale comme ça plus de problème pour les autres cas .
Oui le cas le plus défavorable serait davoir à compenser complètement le poids plus les frottements - mais ça pousse à sur dimensionner le moteur
Dans la pratique pas sûr que le bateau aille sur leau dans des conditions de houle drastique ni que bouger un poids dans ces conditions soit suffisant de toutes façon (vu la taille de la planche et du mobile on ne parle pas dun bateau de taille significative)
il est vraie néanmoins en procédant de la sorte je suis d'avoir un moteur qui permettra d'asservir mon système peut importez les conditions et cela me permet d'avoir une petite marge .
Quel est la taille du bateau ? Quellle masse voulez vous faire bouger ? Ya til un humain sur la bateau ? Cest potentiellement des dizaines de kg quil faudrait déplacer
Bonjour Seb201,
A la verticale, le bateau coule et il n'y a plus qu'à espérer que le fond soit bien horizontal. Auquel cas le problème est résolu définitivement
45 ° c'est déjà très important et comme Jay M l'a écrit en mode de fonctionnement la pente doit rester faible. Il n'y a qu'en butée (ie hors limite de fonctionnement donc avec une pente qui peut être importante) qu'il faut au moins éviter que le poids ne redescende.
Salutations
Ever tried. Ever failed. No matter. Try Again. Fail again. Fail better. (Samuel Beckett)
C'est vraie ,mais je préfère avoir une bonne marge de manoeuvre pour éviter tout problème meme si c'est peut être un peu exagéré.J'aurais de même besoin d'aide a propos du correcteur , je dois utiliser un correcteur pid (proportionnel intégrateur derivateur) néanmoins je ne sais pas du tout comment cela s'insère dans le code et comment dois je choisir les valeurs des différentes constantes . Merci d'avance.
Regarder un peu plus haut il y a une video de ma maquette . La masse à déplacer doit faire une centaines de grammes mais je n'ai pas de valeurs précises et puis je re rajouterai un pois si nécessaire mais cela m'étonnerai que ça soit nécessaire.
Bonjour à tous et bonne semaine
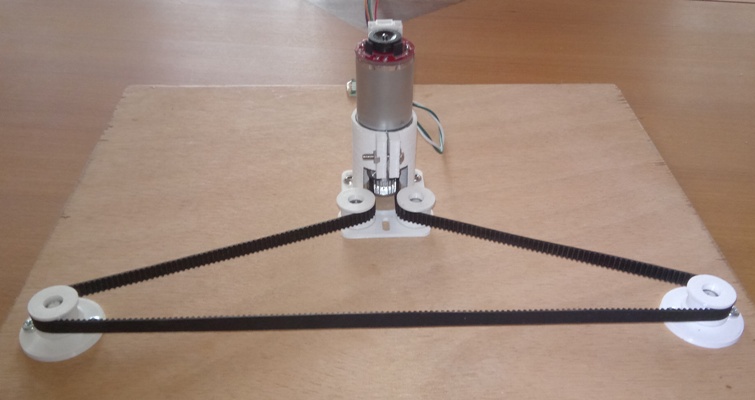
Je me suis "lancé" dans l'exercice et ai fait un petit montage en faisant chauffer, un petit peu, mon imprimante 3D.
La partie mécanique:
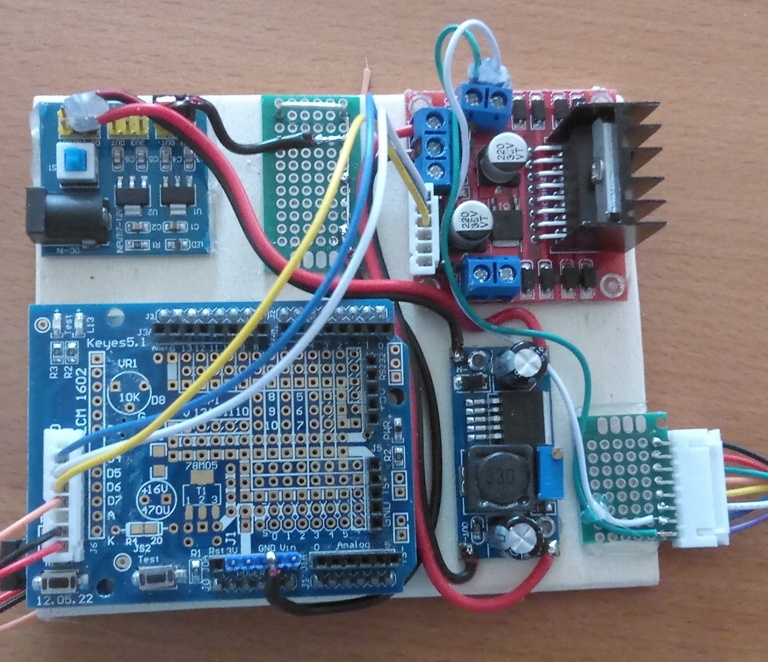
La partie electronique:
C'est une excellente occasion pour étudier les PID.
Je vais utiliser un capteur GY-85.
A+
Cordialement
jpbbricole
L'expérience est la seule chose qu'il ne faut acheter que d'occasion!

Vous avez un bloqueur de publicités installé.
Le Club Developpez.com n'affiche que des publicités IT, discrètes et non intrusives.
Afin que nous puissions continuer à vous fournir gratuitement du contenu de qualité, merci de nous soutenir en désactivant votre bloqueur de publicités sur Developpez.com.
 Répondre avec citation
Répondre avec citation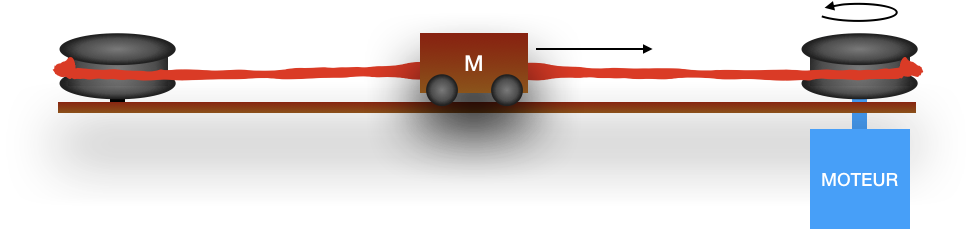
Partager