









Bonjour !
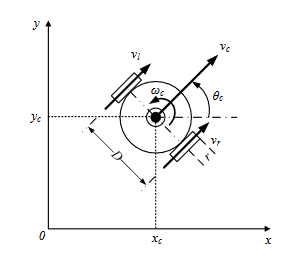
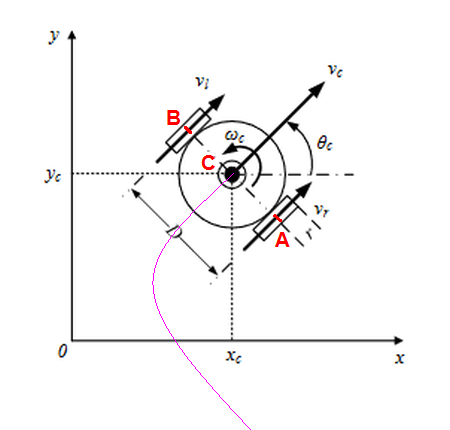
Mon objectif est de faire se déplacer un robot constitué de 2 roues selon une trajectoire définie avec une courbe de Bézier cubique.
L'idée finale est de pouvoir donner un point au robot vers lequel il se déplacera et un angle final que le robot devra avoir sur le point.
Le programme qui gère ce robot s'exécute périodiquement à un temps donné (toute les 2ms par exemple)
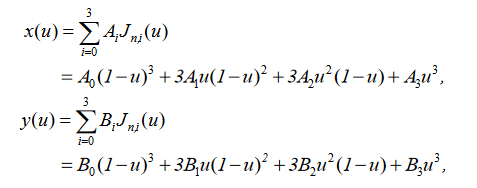
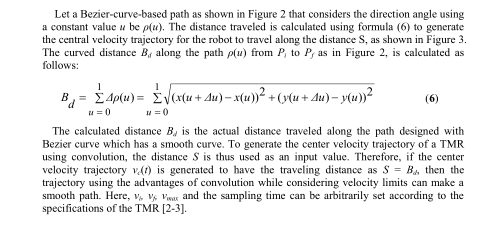
J'arrive à générer une trajectoire avec ces formules :
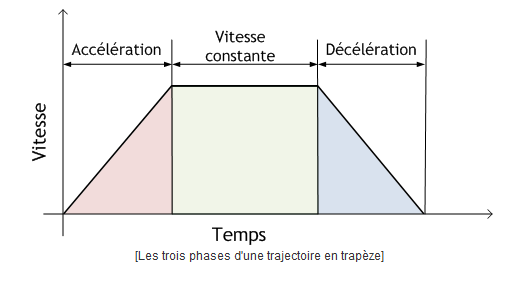
L'idée est maintenant de pouvoir faire se déplacer le robot selon cette trajectoire avec une vitesse qui suit un profil trapézoïdal de ce type :
Avec une vitesse max, une accélération et une décélération prédéfinie.
Mais je ne vois pas comment m'y prendre. Le fait que les points de la trajectoire dépendent de u (0 <= u<= 1) me bloque.
Il me semble qu'il faut que je récupère une distance à parcourir par chaque roue toute les 2ms (la période d'exécution du programme) car j'ai un asservissement en position sur chaque roue.
J'ai trouvé cet article qui a l'air de traiter de mon problème mais je n'arrive à appliquer ce qui y est expliqué : 21.pdf
Voilà, j'ai essayé d'être assez clair. Si vous avez besoin de précisions dites le moi.
Je vous remercie par avance
 Répondre avec citation
Répondre avec citation







Partager