1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
| %1.Define data
%1.0.Simple data
rho=1000;
g=9.8;
mu=0.001;
eps=0.001;
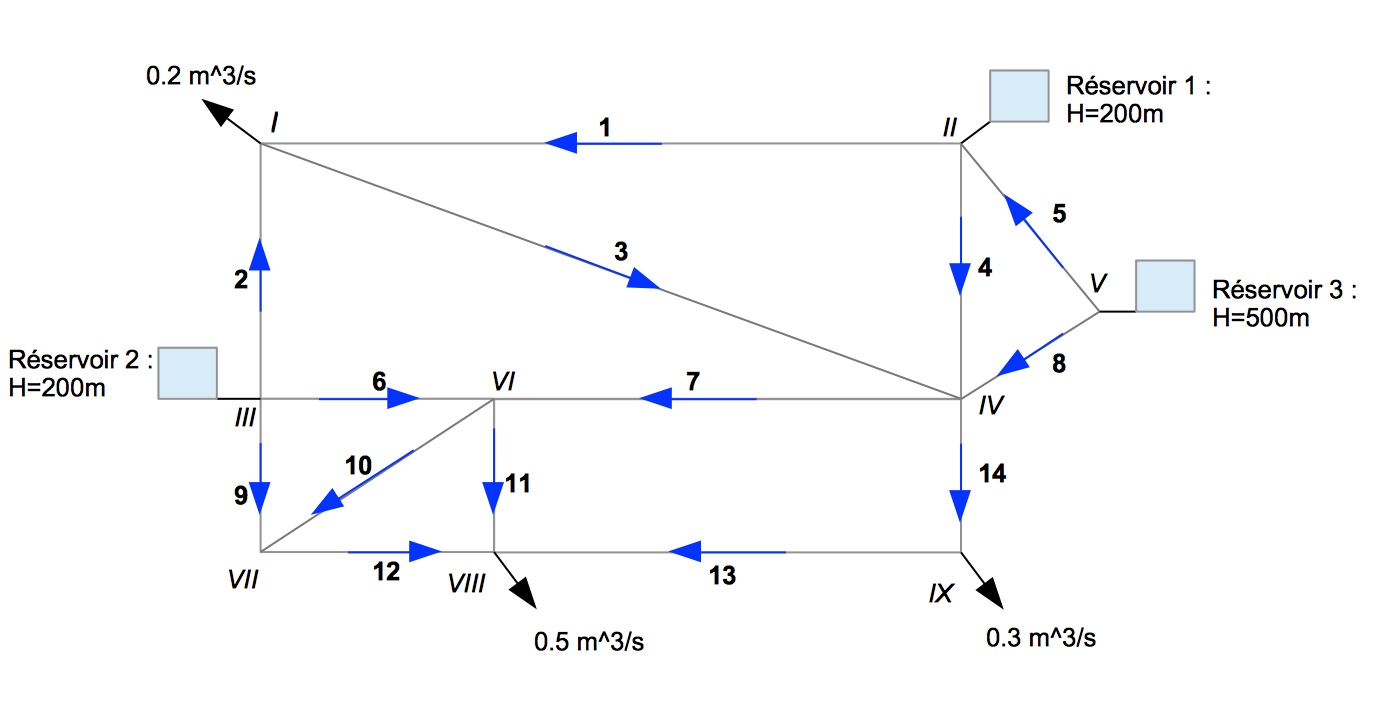
NN=9;
NE=14;
error=0.0001;
%1.1.Conectivity matrix
E= [1 -1 0 0 0 0 0 0 0;
1 0 -1 0 0 0 0 0 0;
1 0 0 -1 0 0 0 0 0;
0 1 0 -1 0 0 0 0 0;
0 1 0 0 -1 0 0 0 0;
0 0 1 0 0 -1 0 0 0;
0 0 0 1 0 -1 0 0 0;
0 0 0 1 -1 0 0 0 0;
0 0 1 0 0 0 -1 0 0;
0 0 0 0 0 1 -1 0 0;
0 0 0 0 0 1 0 -1 0;
0 0 0 0 0 0 1 -1 0;
0 0 0 0 0 0 0 1 -1;
0 0 0 1 0 0 0 0 -1];
%1.2.Lengths vector
L=[600;400;900;400;400;350;600;400;300;500;300;350;600;300];
%1.3.Diameters vector
D=[0.5;0.5;0.5;0.5;0.4;0.5;0.5;0.4;0.3;0.3;0.3;0.3;0.3;0.3];
%1.4.Inflows at the nodes vector. The unknown inflows will be set to zero
%initially, and then will change its value (C2, C3, C5)
C=[-0.2;0;0;0;0;0;0;-0.5;-0.3];
%1.5.Piezometric heights vector.
H=[0;200;200;0;500;0;0;0;0];
%1.6.Boolean vector that determines whether we know the inflow Ci or the
%piezometric height Hi (1 for known C and 0 for known H)
BOOL=[1;0;0;1;0;1;1;1;1];
%1.7.Valves f vector
F=[0;0;0;0;10;0;0;15;0;0;0;0;10;0];
%1.8.Initialise Q vector
Q=ones(NE,1);
%1.9.Initialise Lambdas vector
LA=zeros(NE,1);
for i=1:NE
LA(i)=(-2*log(eps/(D(i)*3.7))/log(10))^-2;
end
%2.Problem solution
BOOL2=1;
iteration=1;
RELQ=zeros(NE,100000);
RELX=zeros(NE,100000);
MEMX=zeros(NN,100000);
MEMQ=[Q,zeros(NE,100000-1)];
RESIDUALS=zeros(NE,100000);
while BOOL2==1
%2.1.Define K matrix (diagonal, such that E*H=K*Q)
K=diag([zeros(1,NE)]);
for i=1:NE
K(i,i)=8*abs(Q(i))*(LA(i)*L(i)/D(i)+F(i))/(g*pi^2*D(i)^4);
end
%Calculate residuals for the problem (from the previous iteration
RESIDUALS(:,iteration)=abs(Q-((K\E)*H));
%2.2.Define M matrix as tras(E)*inv(K)*E
M=E'*(K\E);
%2.3.Use of the algorithm (shown in class) to find the A matrix.
A=zeros(NN,NN);
for j=1:NN
%Known C(j)
if BOOL(j)==1
for i=1:NN
A(i,j)=M(i,j);
end
%Known H(j)
else
for i=1:NN
if i==j
A(i,j)=-1;
end
end
end
end
%2.4.Use of the algorithm to find b vector
b=zeros(NN,1);
for i=1:NN
for j=1:NN
b(i)=b(i)-M(i,j)*(H(j)*(1-BOOL(j)));
end
if BOOL(i)==1
b(i)=b(i)+C(i);
end
end
%Solve the system of equations A*x=b
x=A\b;
%Set the values of x into the correspondent vector (either H or C)
for i=1:NN
if BOOL(i)==1
H(i)=x(i);
else
C(i)=x(i);
end
end
%Compute Q
Q=K\E*H;
%Store values of Q and X in two matrices
for i=1:NE
MEMQ(i,iteration+1)=Q(i);
end
for i=1:NN
MEMX(i,iteration+1)=x(i);
end
%Calculate relative increments for Q and X
for i=1:NE
RELQ(i,iteration)=abs((MEMQ(i,iteration+1)-MEMQ(i,iteration))/MEMQ(i,iteration+1));
end
for i=1:NN
RELX(i,iteration)=abs((MEMX(i,iteration+1)-MEMX(i,iteration))/MEMX(i,iteration+1));
end
%Compare relative increments and residuals with the error limit
BOOL2=0;
if max(RELQ(:,iteration))>=error
BOOL2=1;
end
if max(RELX(:,iteration))>=error
BOOL2=1;
end
if max(RESIDUALS(:,iteration))>=error
BOOL2=1;
end
%Recalculate lambda before next iteration
RE=zeros(NE,1);
for i=1:NE
RE(i)=4*rho*abs(Q(i))/(pi*mu*D(i));
end
for j=1:10
for i=1:NE
LA(i)=(-2*log((eps/(D(i)*3.7))+(2.51/(RE(i)*sqrt(LA(i)))))/log(10))^-2;
end
end
iteration=iteration+1;
if (iteration==100000)
BOOL2=0;
end
end
PLOT1=zeros(iteration,1);
PLOT2=zeros(iteration,1);
PLOT3=zeros(iteration,1);
for i=1:iteration
PLOT1(i)=max(RELQ(:,i));
PLOT2(i)=max(RELX(:,i));
PLOT3(i)=max(RESIDUALS(:,i));
end
semilogy(PLOT1)
semilogy(PLOT2)
semilogy(PLOT3) |











 Répondre avec citation
Répondre avec citation

 , en remplaçant V2 par le produit V*Abs(V) .
, en remplaçant V2 par le produit V*Abs(V) .






Partager