








Bonjour,
J'ai un petit souci, j'ai des couples roulis tangage et azimut elevation mais je n'ai pas la formule pour passer de l'un à l'autre...
Par exemple :
Az ele ::: Roulis Tangage
45° 6° <> -8.655° 8.655°
90° 2° <> 0° 2°
Qui aurait l'algo pour cette passerelle SVP ?
Merci
 Répondre avec citation
Répondre avec citation









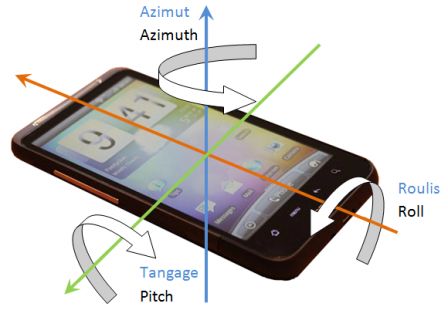








 .... Mais le lacet (qui tourne sur lui même comme le roulis et le tangage) ça oui, on est dans une sphère.....
.... Mais le lacet (qui tourne sur lui même comme le roulis et le tangage) ça oui, on est dans une sphère.....

Partager