









Bonjour,
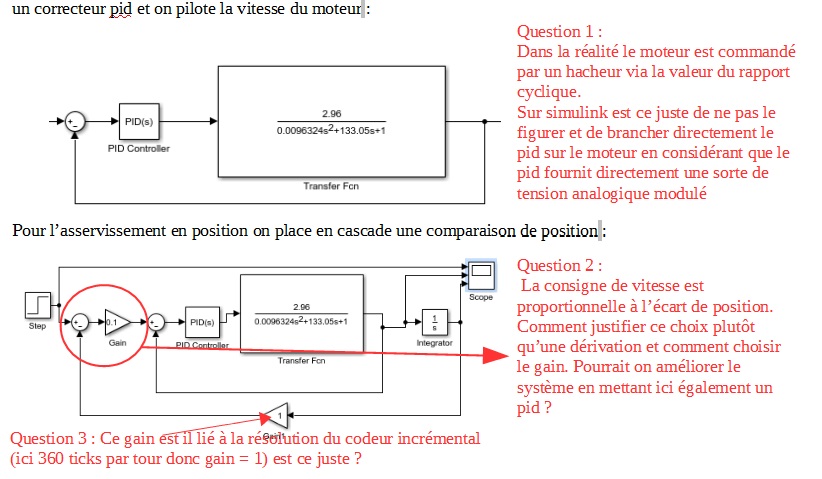
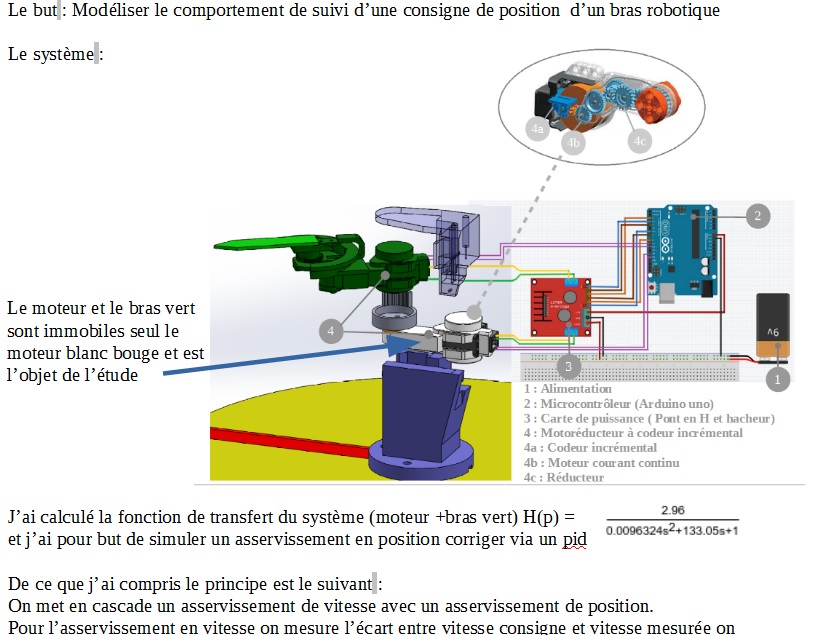
j'ai modélisé sous simulink l'asservissement en position d'une articulation robotique corrigé par pid
Je m'interroge sur 3 points : la nécessité ou non de modéliser le hacheur (le pid suffit_il?); la façon d'élaborer la consigne de vitesse, le gain de retour en position
Pour plus de clarté je vous donne le détail ci_dessous
 Répondre avec citation
Répondre avec citation

Partager