









Bonjour
J'ecris car j'essaye d'aider sur le dev d'un systeme de control de moteur pour des objectives pour le cinema.
https://www.motiondogs.com/wireless-...-base-kit.html
Le systeme est ecrit en arduino leonard et controle un "stepper motor".
Le code source est dispo en open source:
https://github.com/MotionDogs/Lenzhound-1.x
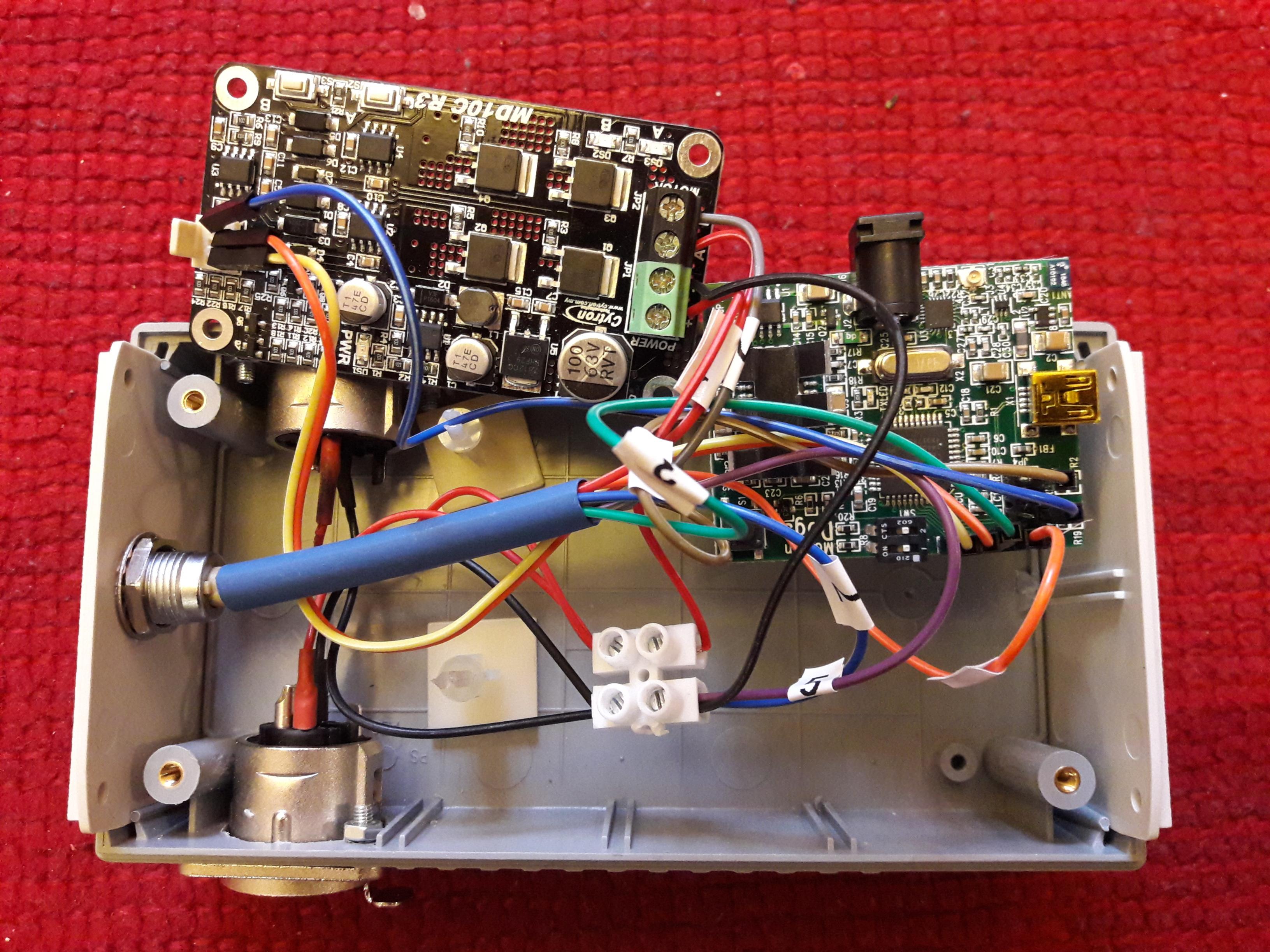
Le probleme est que le "stepper motor" est bruyant et n'est pas tres puissance, donc mon projet est d'adapter ce systeme vers des moteurs servo plus puissant.
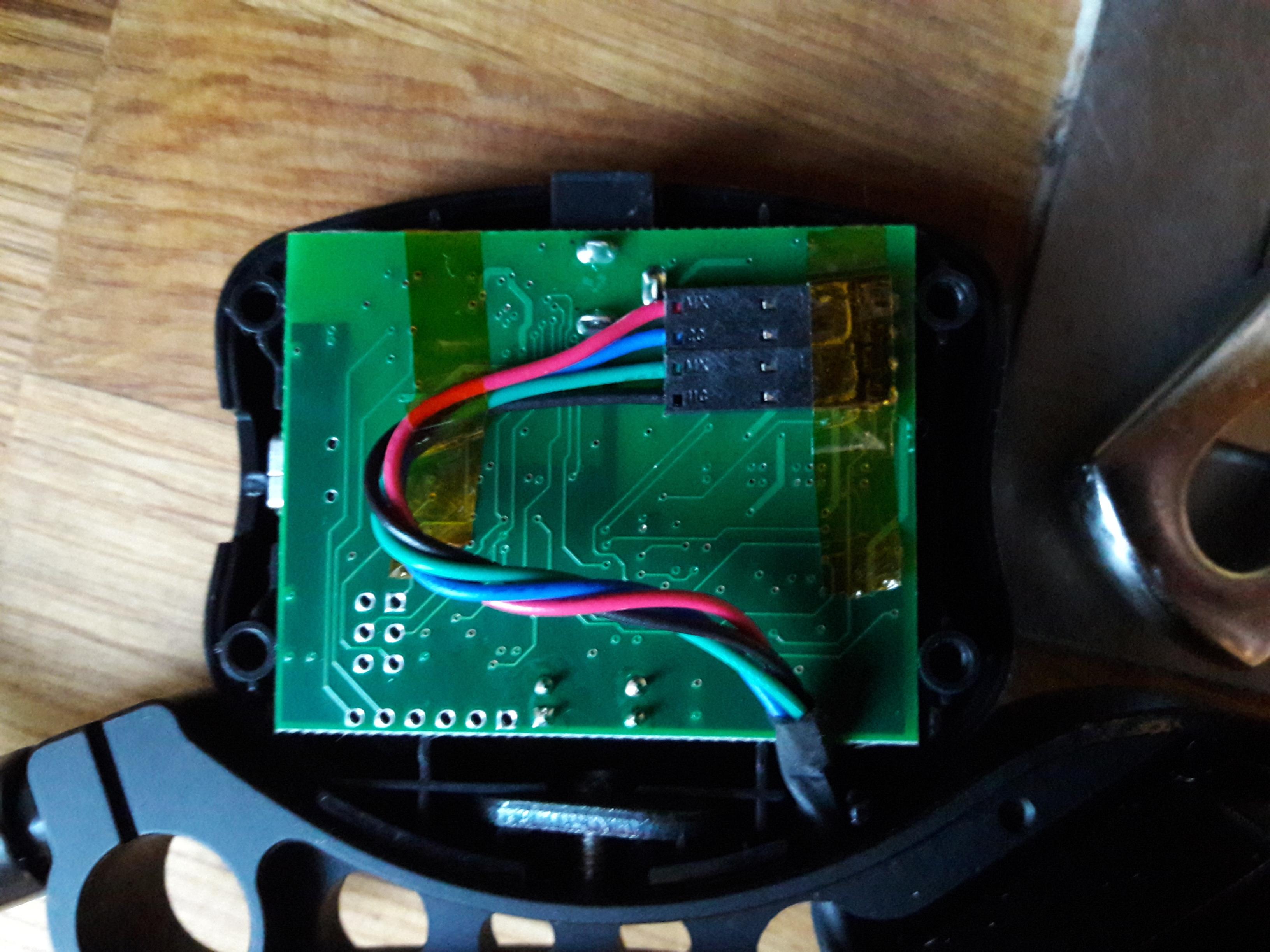
J'ai eu des longues discussion avec le fabriquant sur comment cablé un controlleur moteur DC sur leur carte mere et meme eu la preuve que ca peux marcher
http://forum.motiondogs.com/t/using-...-motors/230/31
Pour faire cette adaptation,il est sugéré d'intergrer Softpwm dans leur code source, tester avec le moteur que j'ai et trouvé les meilleurs "settings".
Probleme : je ne connais rien en cpp.
J'ai du mal a savoir si ce projet est difficile ou pas donc je cherche quelqu'un qui puisse me pister.
Merci d'avance
 Répondre avec citation
Répondre avec citation






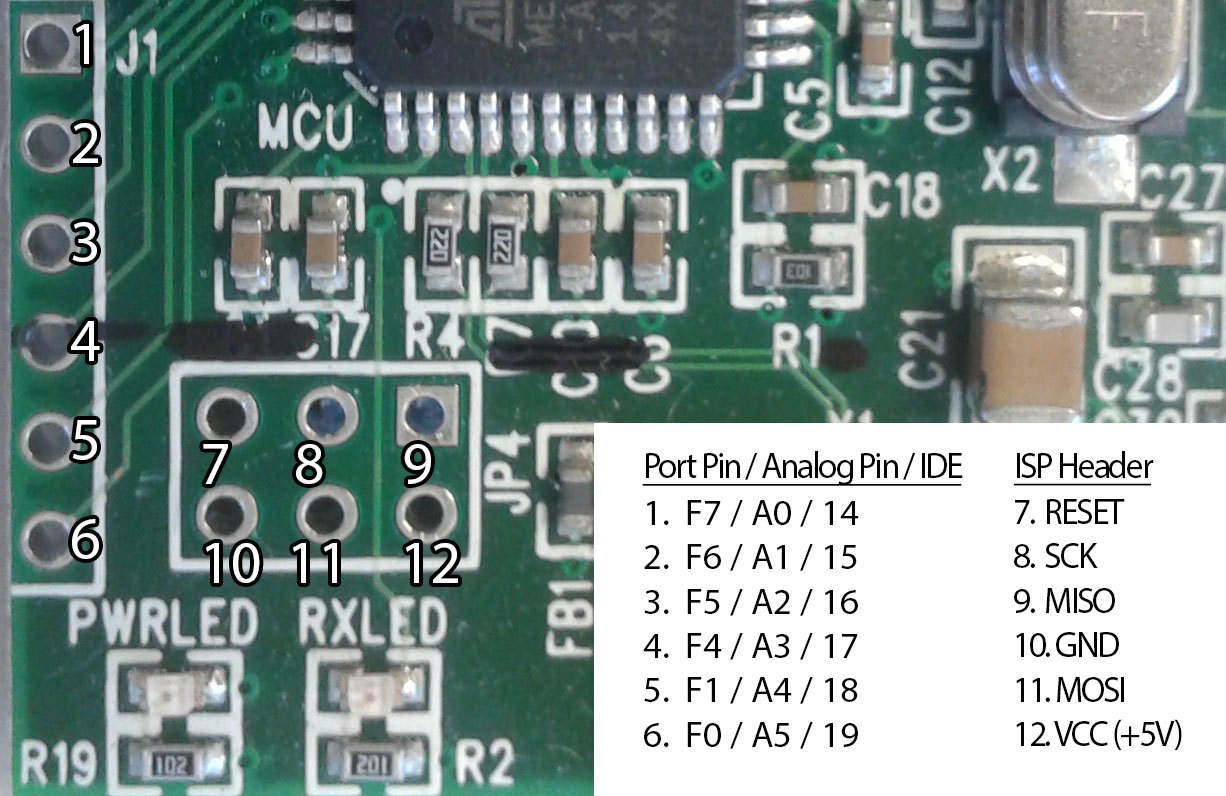
 ) comme sorties PWM pour piloter ton moteur. Or ces voies ne sont pas des voies PWM, problème que peut corriger la bibliothèque SoftPWM.
) comme sorties PWM pour piloter ton moteur. Or ces voies ne sont pas des voies PWM, problème que peut corriger la bibliothèque SoftPWM. .
.





Partager