









Bonjour à toutes et à tous, je suis étudiant et cherche à modéliser le comportement d'un véhicule (type robot télécommandé), mon modèle est composé de deux roues et d'un châssis (en 2D). J'ai déjà représenté séparément le comportement d'une roue libre (sans couple moteur) avec succès mais maintenant je dois simuler le comportement du système entier et mes graphiques sont faux, la cause peut-être due à la modélisation du couple moteur ou de la méthode de résolution (ode45 ou non). Pouvez-vous m'indiquer où est mon erreur s'il vous plait ?
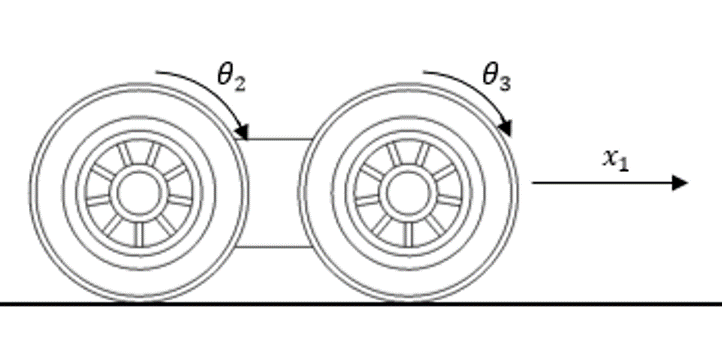
Représentation du système 2D
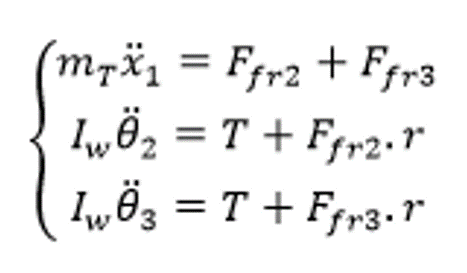
Voici les 3 équations que je souhaite modéliser avec r le rayon de la roue, T le couple moteur, Ffr la force de friction:
En pièce jointe mon modèle simulink et mon code Matlab pour tracer les courbes
Robot 2D.zip
Merci à vous !
 Répondre avec citation
Répondre avec citation
Partager