









bounjour , je suis entrain de developpez une Bras robotisé 5 servomoteurs avec pince : Bras robotisé 5 servomoteurs avec pince : Préhension de balle à à partir de la détection et du calcul de position d'une balle par webcam via une interface Processing de contrôle.
mon projet alors est diviser en trois partie :
1ere partie : programme processing : Ce programme Processing réalise d'une part la reconnaissance visuelle de la balle à saisir lorsqu'elle est placée sur la zone cible. Les coordonnées réelles en cm de la balle sont extraite de l'analyse de la position de la balle dans l'image vidéo issue de la webcam
2eme partie : programme arduino :
3eme partie : la simulation sur isis :
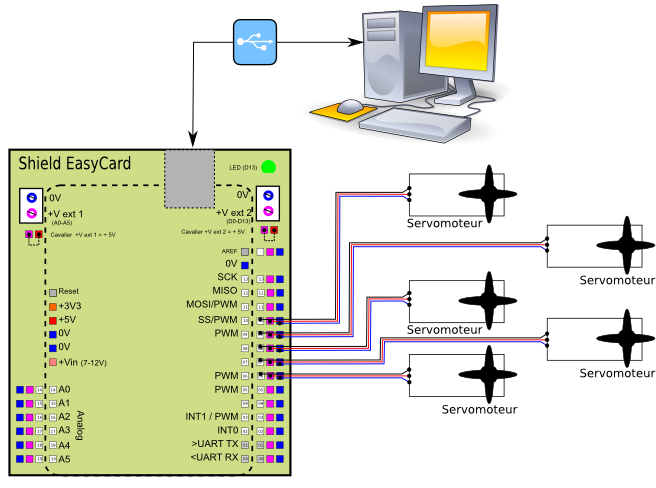
le montage de circuit est indiquer ci-dessous :
probleme : mon probleme situé au niveau d'isis tel que je ne connait comment prendre comme entré de la carte arduino , svp quelq'un m'aider et mercii
 Répondre avec citation
Répondre avec citation
Partager