1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
| public class HarrisLaplace {
private GaussianPyramid gp = null;
// compute Gradient (sobel)
private float[] sobel(int x, int y, int o, int s, float[] sobel) {
PyramidLevel p = this.gp.getLevel(o, s);
float v00 = p.getData(x-1, y-1), v10 = p.getData(x, y-1), v20 = p.getData(x+1, y-1);
float v01 = p.getData(x-1, y ), v21 = p.getData(x+1, y );
float v02 = p.getData(x-1, y+1), v12 = p.getData(x, y+1), v22 = p.getData(x+1, y+1);
float sx = (v20+2*v21+v22)-(v00+2*v01+v02);
float sy = (v02+2*v12+v22)-(v00+2*v10+v20);
if (sobel==null) sobel=new float[2];
sobel[0]=sx/4; sobel[1]=sy/4;
return sobel;
}
// compute Laplacian
private float laplacian(int x,int y, int o, int s) {
PyramidLevel p = this.gp.getLevel(o, s);
float v10 = p.getData(x, y-1);
float v01 = p.getData(x-1, y ), v11 = p.getData(x, y ), v21 = p.getData(x+1, y );
float v12 = p.getData(x, y+1);
float laplacian = -v11 + 0.25f*(v10+v01+v21+v12);
return laplacian;
}
// compute Scale-Normalized Laplacian
private float laplacianNormalized(int x,int y, int o, int s) {
float sigma2 = (float)this.gp.getLevel(o, s).sigma2;
return sigma2*laplacian(x,y,o,s);
}
// compute Harris measure
private float harris(int x,int y, int o, int s) {
float m00=0, m01=0, m10=0, m11=0;
float[] sobel = new float[2];
// Gaussian kernel of the integration window
float[][] kernel = {{1,2,1},{2,4,2},{1,2,1}};
float normalizer=16;
// for each pixel in the integration window
for(int dy=-1;dy<=1;dy++) {
for(int dx=-1;dx<=1;dx++) {
int xk = x + dx;
int yk = y + dy;
// gradient value
sobel(xk,yk,o,s,sobel);
float gx = sobel[0];
float gy = sobel[1];
// gaussian weight
float w = kernel[1+dx][1+dy];
// second-moment matrix elements
m00 += gx * gx * w;
m01 += gx * gy * w;
m10 = m01;
m11 += gy * gy * w;
}
}
// harris measure
float harris = m00*m11 - m01*m10 - 0.06f*(m00+m11)*(m00+m11);
harris = harris/(255*255*normalizer);
return harris;
}
// return true if the pixel (x,y,o,s) is a scale extrema
private boolean isScaleExtrema(int x,int y, int o, int s) {
float lap = laplacianNormalized(x,y,o,s);
if (Math.abs(lap)<1) return false;
float lap_prev = laplacianNormalized(x,y,o,s-1);
float lap_next = laplacianNormalized(x,y,o,s+1);
if (lap_prev<lap && lap>lap_next) return true;
if (lap_prev>lap && lap<lap_next) return true;
return false;
}
// return true if the pixel (x,y,o,s) is a spatial maxima
private boolean isSpatialMaxima(int x,int y, int o, int s) {
double h = harris(x,y,o,s);
if (Math.abs(h)<1) return false;
if (h<=harris(x-1,y-1,o,s) || h<=harris(x ,y-1,o,s) || h<=harris(x+1,y-1,o,s)) return false;
if (h<=harris(x-1,y ,o,s) || h<=harris(x+1,y ,o,s)) return false;
if (h<=harris(x-1,y+1,o,s) || h<=harris(x ,y+1,o,s) || h<=harris(x+1,y+1,o,s)) return false;
return true;
}
// main algorithm
public void detect(int[][] image, int width, int height) {
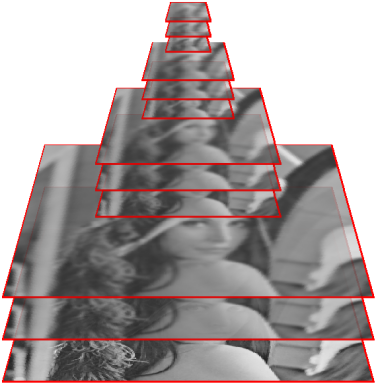
int octaves=5, scales=9;
this.gp = new GaussianPyramid(octaves, scales);
this.gp.build(image, width, height);
// for each octave+scale
for(int o=0;o<gp.getOctaves();o++) {
for(int s=1;s<gp.getScales()-1;s++) {
int w = gp.getLevel(o, 0).width;
int h = gp.getLevel(o, 0).height;
// explore all pixels of the level
for (int y=1; y<h-1; y++) {
for (int x=1; x<w-1; x++) {
// keep only spatial maxima
if (!isSpatialMaxima(x, y, o, s)) continue;
// keep only scale extrema
if (!isScaleExtrema(x, y, o, s)) continue;
// localization in original image (average)
int xc = (int)Math.round((0.5+x)*(1<<o));
int yc = (int)Math.round((0.5+y)*(1<<o));
int sc = (int)Math.round(gp.getSigma2(o,s));
System.out.printf("Found points x=%d, y=%d, sigma²=%d\n",xc,yc,sc);
}
}
}
}
}
} |













 Répondre avec citation
Répondre avec citation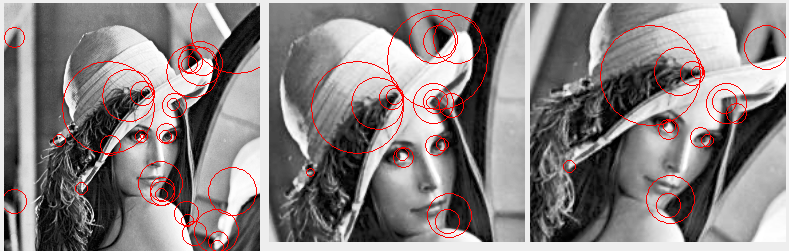



Partager