









bonjour à tous, je rencontre des difficultés pour mon multi-thread avec les classe codeur et afficheur. Le problème que j'ai actuellement est que toutes les 100 milliseconde environ je récupère des informations sous forme de trame grâce à la classe noeud_can (envoyer_trame / recevoir_trame) pour la méthode CodeurValeur() de la classe Codeur.cs.
Mais comme j'ai le thread de cette méthode et celle de l'afficheur (CodeurValeurAfficheur()), 1 fois sur 5 environ je ne reçoit pas de trame et donc je n'obtient pas de valeur.
Je n'ai pas ce problème lorsque le thread du codeur fonctionne tout seul, sans celui de l'afficheur. Si je remet en place le thread de l'afficheur et que je le lance, le problème revient.
--------------------------------------------------------------------------
Classe Codeur.cs
La valeur du capteur est 222
--------------------------------------------------------------
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
Classe Afficheur.cs
-----------------------------------------------------------------
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
Classe noeud_can.cs
-----------------------------------------------------------
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
Main
---------------------------------------------------------------
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
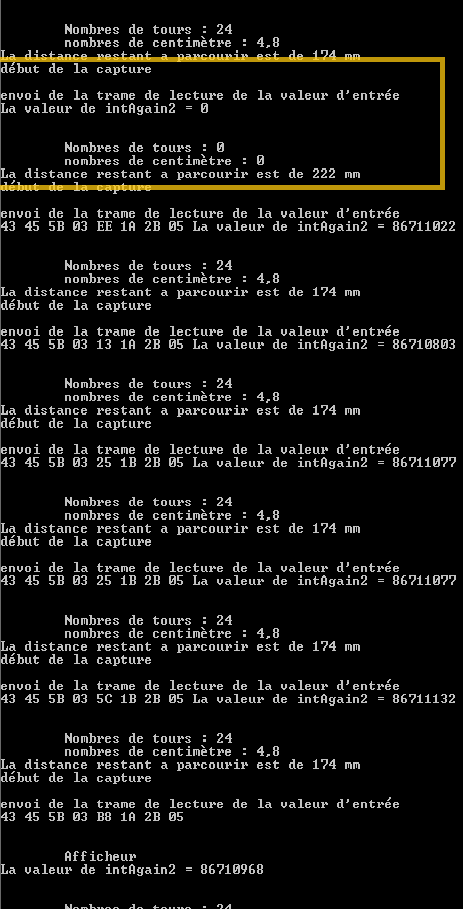
Image console du programme avec la trame vide
Comme le montre l'image de la console. Dans la zone encadré en orange on voit que je ne reçois pas de trame de réponse du noeud_can avant la phrase "La valeur de intAgain2 = 0". Du coup la méthode de la classe codeur n'a que la valeur du capteur (222), et vu que la valeur de la trame de réponse vaut 0, le nombres de tours et le nombres de centimètres ne peuvent être calculés.
Le problème vient de mes thread ?
est-ce que je dois utiliser des sémaphore ou passer par autre chose ?
S'il faut d'autres informations, indiquer-les moi.
 Répondre avec citation
Répondre avec citation


Partager