









Bonjour tout le monde,
J'ai 3 points (A, B, C) dont je connais leurs coordonnées dans le repère 1. Un utilisateur doit sélectionner ces points dans un autre repère 2 (A', B', C'). Pour ce faire, l'utilisateur voit une zone autour des 3 points.
Au début, j'ai essayé de comparer la longueur entre les 3 segments du triangle (qui ne sera jamais isocèle ou équilatéral) à l'aide des coordonnées des 3 points dans les deux repères puis de trier les segments en fonction de leur longueur.
Le problème est que la zone d'incertitude autour de chaque point influence grandement la comparaison des longueurs.
J'ai essayé en utilisant des ratios entre les longueurs des segments mais comme je m'y attendais, je n'obtiens pas le résultat attendu: à savoir que le point A' doit correspondre au point A, B' au point B, C' au point C.
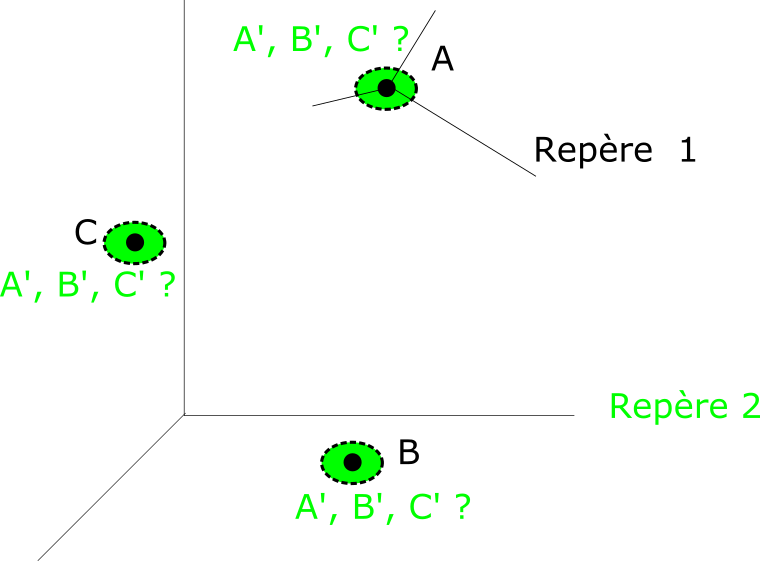
Voici un petit schéma pour résumer un peu la situation.
Je n'ai pour le moment pas les dimensions de la zone d'incertitude autour de chaque point (en vert).
Quelqu'un aurait-il des conseils à me donner?
Merci d'avance
 Répondre avec citation
Répondre avec citation




Partager