








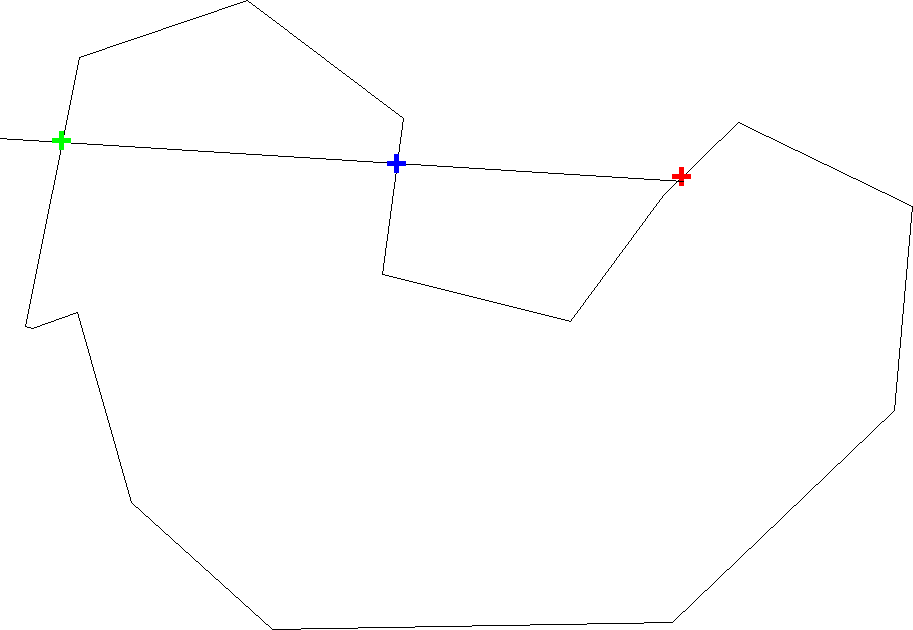
le soucis avec atan2 c'est que si on prend un point quelconque, les points alignés avec celui auront le meme angle, du coup, si on classe suivant l'angle, ils seront a coté, alors que pas du tout
si on prend le points rouge en référence, les points bleu et vert auront le meme angle et seront donc confondu.
et comme je dis dans mon premier message, si sur une plage de 3° j'ai plusieurs points, je prend le plus lointain.
pour moi la solution de l'atan2 marche que si le point de référence est au centre, car dans mon cas de figure (sonde laser), je ne me retrouverait pas a recouper plusieurs fois une paroi car le laser ne voit pas a travers les obstacles
 Répondre avec citation
Répondre avec citation







Partager