










Bonjour,
J'ai un problème de stéréovision à résoudre. J'ai parcouru le forum et ai trouvé des réponses intéressantes, mais souvent trop compliquées pour mon application.
Mon problème est "simple" : j'ai deux caméras espacées d'une distance B connue.
J'obtiens donc deux photos de la même scène.
Sur la scène, je détecte 10 points caractéristiques précis. J'ai donc 10 jeux de coordonnées 2D par image.
Pour chaque point, je veux calculer la profondeur Z.
Si on admet que les caméras sont parfaitement alignées, y a-t-il un moyen simple de calculer cette dernière coordonnée ?
Et si les deux caméras ont une translation t et une rotation r l'une par rapport à l'autre, comment peut-on calculer cette profondeur ?
J'ai recherché sur internet des réponses, mais il y a certains paramètres que je ne comprends pas...
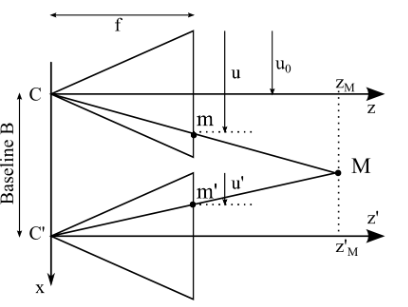
Je joins la photo représentative de mon problème :
Ici, on comprend bien que zm et zm' sont égales, et la formule est la suivante : zm = (B*alpha) / (u - u')
avec B la baseline (distance entre les caméras). Je ne comprends pas à quoi correspond le alpha de la formule.
De plus, qu'est-ce que u-u' ? Est-ce la distance entre les deux images du point M si l'on superposait les deux images ?
Je suis un peu perdue, j'espère que quelqu'un pourra m'aider
Merci d'avance
 Répondre avec citation
Répondre avec citation








Partager