1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
|
%% Nettoyage
clear all; close all; clc;
%% Définitions
TYPE = 'int32';
img = imread('peppers.tif');
img_ycbcr = rgb2ycbcr(img);
img_Y = int32(img_ycbcr(:,:,1));
H = numel(img_Y(:,1));
W = numel(img_Y(1,:));
mat = 1/159*[2,4,5,4,2;4,9,12,9,4;5,12,15,12,5;4,9,12,9,4;2,4,5,4,2];
% Filtrage de l'image de base afin de réduire le bruit de l'image
img_f = my_Filter(img_Y, mat);
%img_f = img_Y;
% Balayage de l'image pour filtrage
G_y = zeros(size(img_Y), TYPE);
G_x = zeros(size(img_Y), TYPE);
G = zeros(size(img_Y), TYPE);
G_max = zeros(size(img_Y), TYPE);
G_bin = zeros(size(img_Y), TYPE);
theta = zeros(size(img_Y), TYPE);
theta_p = zeros(size(img_Y), TYPE);
for ind_y = 2 : H-1
for ind_x = 2 : W-1
% Filtre de Sobel
% Application du filtre horozontal
G_x(ind_y, ind_x) = (...
+1*img_f(ind_y-1,ind_x-1) + 0*img_f(ind_y-1,ind_x) - 1*img_f(ind_y-1,ind_x+1) + ...
+2*img_f(ind_y ,ind_x-1) - 0*img_f(ind_y ,ind_x) - 2*img_f(ind_y ,ind_x+1) + ...
+1*img_f(ind_y+1,ind_x-1) + 0*img_f(ind_y+1,ind_x) - 1*img_f(ind_y+1,ind_x+1) );
% Application du filtre vertical
G_y(ind_y, ind_x) = (...
+1*img_f(ind_y-1,ind_x-1) + 2*img_f(ind_y-1,ind_x) + 1*img_f(ind_y-1,ind_x+1) + ...
0*img_f(ind_y ,ind_x-1) - 0*img_f(ind_y ,ind_x) + 0*img_f(ind_y ,ind_x+1) + ...
-1*img_f(ind_y+1,ind_x-1) - 2*img_f(ind_y+1,ind_x) - 1*img_f(ind_y+1,ind_x+1) );
% Calcul de l'angle du gradient
theta(ind_y, ind_x) = (180/pi)*atan2(double(G_y(ind_y, ind_x)), double(G_x(ind_y, ind_x)));
% Arrondi de l'angle pour obtenir une direction par palier de 45°
if (theta(ind_y, ind_x)>=0-22.5 && theta(ind_y, ind_x)<0+22.5) ...
|| (theta(ind_y, ind_x)>=180-22.5 && theta(ind_y, ind_x)<-180+22.5)
theta_p(ind_y, ind_x) = 0;
elseif (theta(ind_y, ind_x)>=45-22.5 && theta(ind_y, ind_x)<45+22.5) ...
|| (theta(ind_y, ind_x)>=-135-22.5 && theta(ind_y, ind_x)<-135+22.5)
theta_p(ind_y, ind_x) = 45;
elseif (theta(ind_y, ind_x)>=90-22.5 && theta(ind_y, ind_x)<90+22.5) ...
|| (theta(ind_y, ind_x)>=-90-22.5 && theta(ind_y, ind_x)<-90+22.5)
theta_p(ind_y, ind_x) = 90;
elseif (theta(ind_y, ind_x)>=135-22.5 && theta(ind_y, ind_x)<135+22.5) ...
|| (theta(ind_y, ind_x)>=-45-22.5 && theta(ind_y, ind_x)<-45+22.5)
theta_p(ind_y, ind_x) = 135;
end
% Module de G_x
if G_x(ind_y, ind_x) < 0
G_x(ind_y, ind_x) = -G_x(ind_y, ind_x);
end
% Module de G_y
if G_y(ind_y, ind_x) < 0
G_y(ind_y, ind_x) = -G_y(ind_y, ind_x);
end
% Calcul du gradient global
G(ind_y, ind_x) = G_x(ind_y, ind_x) + G_y(ind_y, ind_x);
%G(ind_y, ind_x) = sqrt(double(G_y(ind_y, ind_x)^2)+double(G_x(ind_y, ind_x)^2));
end
end
% Recherche des maximum locaux (Thinning)
G_max = G; % Recopie pour Debug
for ind_y = 2 : H-1
for ind_x = 2 : W-1
if theta_p(ind_y, ind_x) == 0
if G(ind_y, ind_x)<G(ind_y, ind_x-1) || G(ind_y, ind_x)<G(ind_y, ind_x+1)
G_max(ind_y, ind_x) = 0;
end
elseif theta_p(ind_y, ind_x) == 45
if G(ind_y, ind_x)<G(ind_y-1, ind_x-1) || G(ind_y, ind_x)<G(ind_y+1, ind_x+1)
G_max(ind_y, ind_x) = 0;
end
elseif theta_p(ind_y, ind_x) == 90
if G(ind_y, ind_x)<G(ind_y-1, ind_x) || G(ind_y, ind_x)<G(ind_y+1, ind_x)
G_max(ind_y, ind_x) = 0;
end
elseif theta_p(ind_y, ind_x) == 135
if G(ind_y, ind_x)<G(ind_y+1, ind_x-1) || G(ind_y, ind_x)<G(ind_y-1, ind_x+1)
G_max(ind_y, ind_x) = 0;
end
end
end
end
% Seuillage pour binarisation
max_G = max(max(G_max));
t_low = 0.0312*max_G;
t_high = 0.0781*max_G;
for ind_y = 2+1 : H-2 % décallage de 2 car matrice 5x5 dans le cas incertain test2
for ind_x = 2+1 : W-2
if G_max(ind_y, ind_x) < t_low
G_bin(ind_y, ind_x) = 0;
elseif G_max(ind_y, ind_x) >= t_high
G_bin(ind_y, ind_x) = 1;
else
% Recherche de valeur sup. à t_high dans ses 3x3 voisins
if G_max(ind_y-1, ind_x-1)>=t_high || G_max(ind_y-1, ind_x)>=t_high || G_max(ind_y-1, ind_x+1)>=t_high || ...
G_max(ind_y , ind_x-1)>=t_high || G_max(ind_y , ind_x+1)>=t_high || ...
G_max(ind_y+1, ind_x-1)>=t_high || G_max(ind_y+1, ind_x)>=t_high || G_max(ind_y+1, ind_x+1)>=t_high
G_bin(ind_y, ind_x) = 1;
elseif (G_max(ind_y-1, ind_x-1)>=t_low && G_max(ind_y-1, ind_x-1)<t_high) || ...
(G_max(ind_y-1, ind_x )>=t_low && G_max(ind_y-1, ind_x )<t_high) || ...
(G_max(ind_y-1, ind_x+1)>=t_low && G_max(ind_y-1, ind_x+1)<t_high) || ...
(G_max(ind_y , ind_x-1)>=t_low && G_max(ind_y , ind_x-1)<t_high) || ...
(G_max(ind_y , ind_x+1)>=t_low && G_max(ind_y , ind_x+1)<t_high) || ...
(G_max(ind_y+1, ind_x-1)>=t_low && G_max(ind_y+1, ind_x-1)<t_high) || ...
(G_max(ind_y+1, ind_x )>=t_low && G_max(ind_y+1, ind_x )<t_high) || ...
(G_max(ind_y+1, ind_x+1)>=t_low && G_max(ind_y+1, ind_x+1)<t_high)
% Si on est en zone incertaine ( t_low <= G < t_high)
% On test les voisins avec une matrice 5x5 (les voisins 3x3
% sont déjà testé.
if G_max(ind_y-2, ind_x-2)>=t_high || G_max(ind_y-2, ind_x-1)>=t_high || G_max(ind_y-2, ind_x)>=t_high || G_max(ind_y-2, ind_x+1)>=t_high || G_max(ind_y-2, ind_x+2)>=t_high || ...
G_max(ind_y-1, ind_x-2)>=t_high || G_max(ind_y-1, ind_x+2)>=t_high || ...
G_max(ind_y , ind_x-2)>=t_high || G_max(ind_y , ind_x+2)>=t_high || ...
G_max(ind_y+1, ind_x-2)>=t_high || G_max(ind_y+1, ind_x+2)>=t_high || ...
G_max(ind_y+2, ind_x-2)>=t_high || G_max(ind_y+2, ind_x-1)>=t_high || G_max(ind_y+2, ind_x)>=t_high || G_max(ind_y+2, ind_x+1)>=t_high || G_max(ind_y+2, ind_x+2)>=t_high
G_bin(ind_y, ind_x) = 1;
else
% Si aucun des 5x5 voisins n'est supérieur à t_high il
% ne s'agit pas d'un contour
G_bin(ind_y, ind_x) = 0;
end
else
% Si on est inférieur à t_low il ne sagit pas d'un contour
G_bin(ind_y, ind_x) = 0;
end
end
end
end
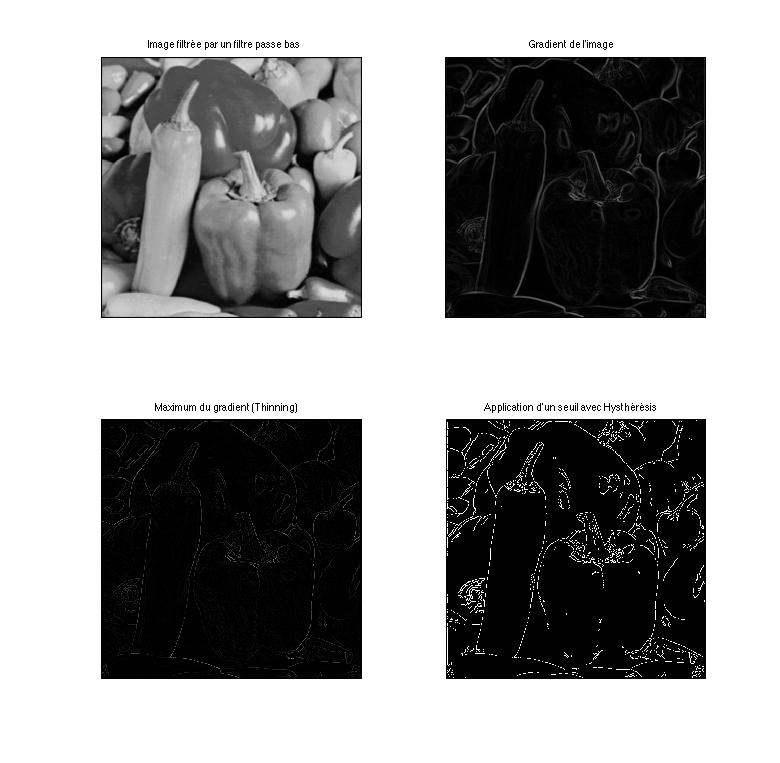
%% Affichage Canny
figure;
subplot(2,2,1);
imshow(img_f, [min(min(img_f)) max(max(img_f))]);
title('Image filtrée par un filtre passe bas');
subplot(2,2,2);
imshow(G, [min(min(G)) max(max(G))]);
title('Gradient de l''image');
subplot(2,2,3);
imshow(G_max, [min(min(G_max)) max(max(G_max))]);
title('Maximum du gradient (Thinning)');
subplot(2,2,4);
imshow(G_bin, [0 1]);
title('Application d''un seuil avec Hysthérésis');
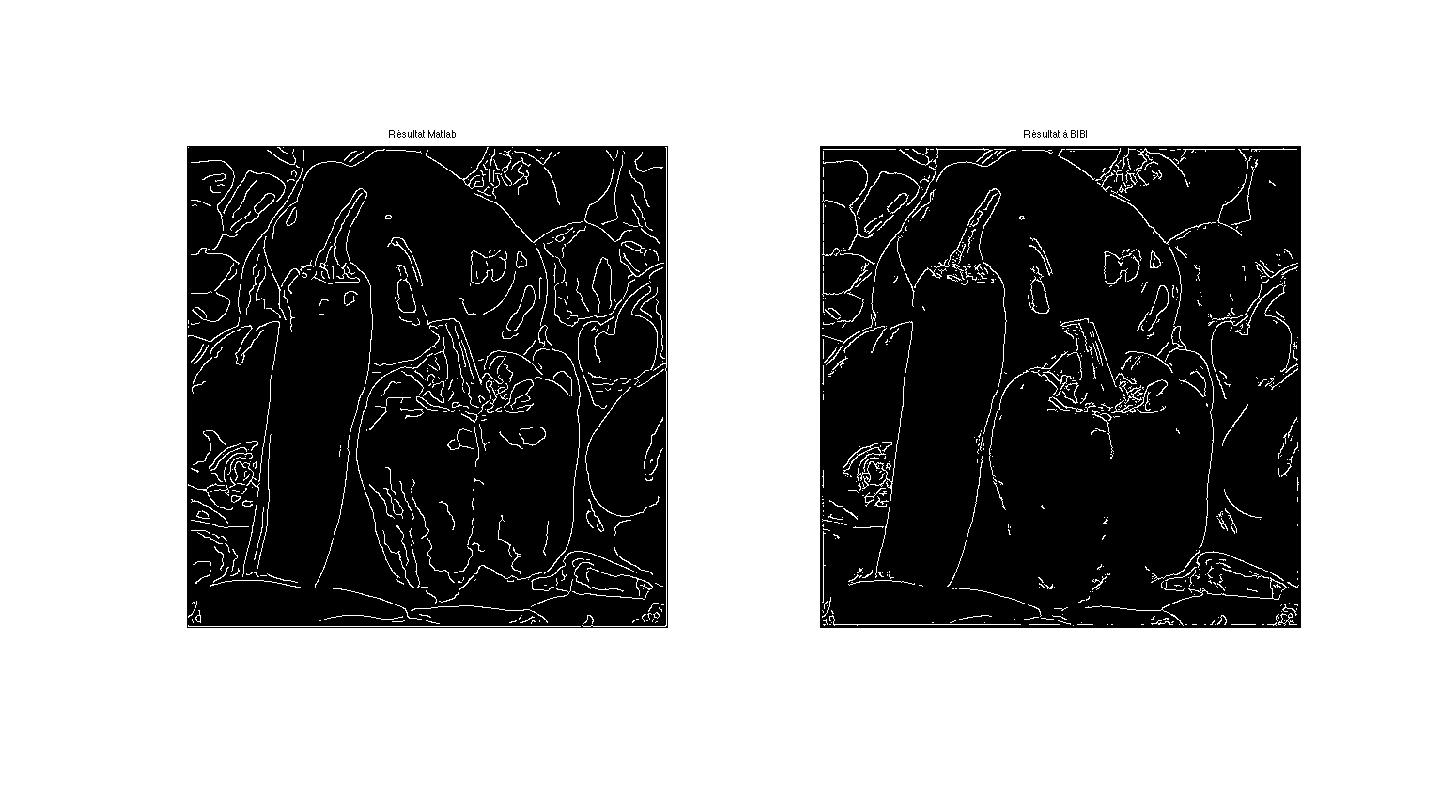
%% Comparaison avec matlab
figure;
subplot(1,2,1);
imshow(edge(double(img_f), 'canny'), [0 1]);
title('Résultat Matlab');
subplot(1,2,2);
imshow(G_bin, [0 1]);
title('Résultat à BIBI'); |










 Répondre avec citation
Répondre avec citation


Partager